Papers
2025
- The Tree of Robots
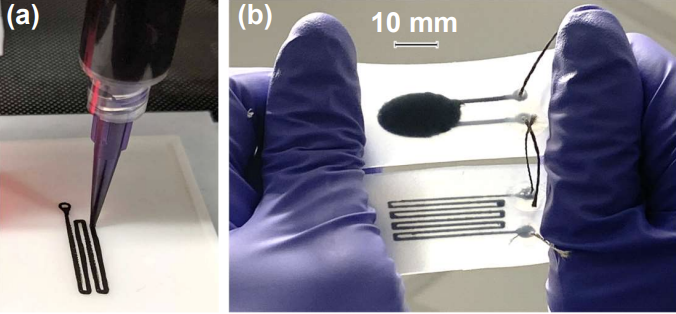
- Stretchable Capacitive and Resistive Strain Sensors: Accessible Manufacturing Using Direct Ink Writing
- A process-centric manipulation taxonomy for the organization, classification and synthesis of tactile robot skills
- A Whole-Body UFIC Framework for Nonholonomic Service Mobile Robots
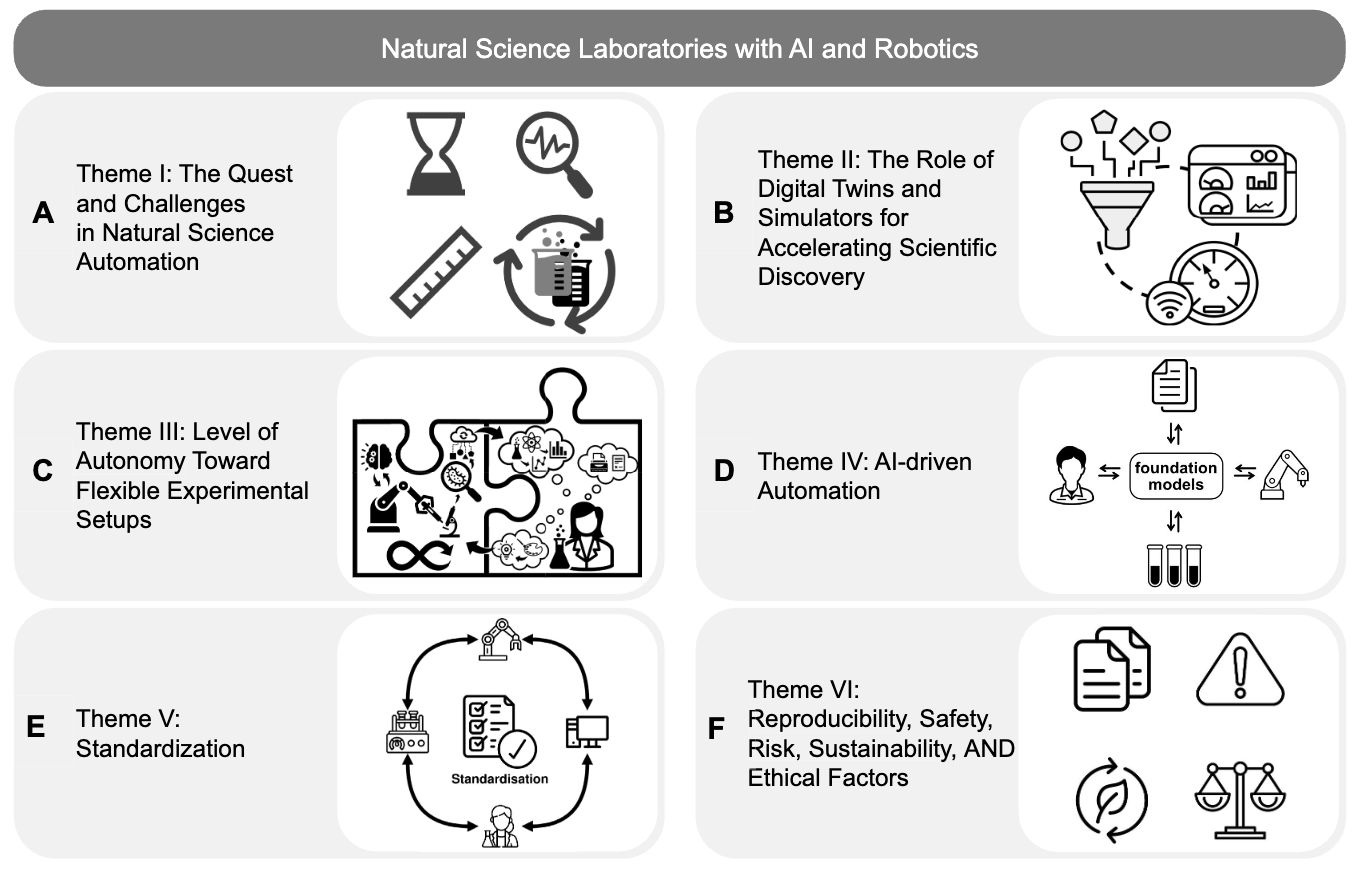
- Accelerating discovery in natural science laboratories with AI and robotics: Perspectives and challenges
- APT*: Asymptotically Optimal Motion Planning via Adaptively Prolated Elliptical R-Nearest Neighbors
- Enhanced Robotic Navigation in Deformable Environments using Learning from Demonstration and Dynamic Modulation
- Estimated Informed Anytime Search for Sampling-Based Planning via Adaptive Sampler
- Fault-Tolerant Decentralized Multi-Sensor Link Velocity and Acceleration Estimation for Elastic-Joint Robots
- Learning Wrist Policies for Anthropomorphic Soft Power Grasping in Handle and Door Manipulation
- LEMMo-Plan: LLM-Enhanced Learning from Multi-Modal Demonstration for Planning Sequential Contact-Rich Manipulation Tasks
- LLM-as-BT-Planner: Leveraging LLMs for Behavior Tree Generation in Robot Task Planning
- Minimally-Back-Drivable Robots for Rehabilitation: Path-Adherent Permissiveness Control via Trajectory Adaptation
- MonLog: MONotonic-Constrained LOGistic Regressions for Automated Safety Curve Design
- Safe Robot Reflexes: A Taxonomy-based Decision and Modulation Framework
- TacDiffusion: Force-Domain Diffusion Policy for Precise Tactile Manipulation
- Tactile Sensor Elements based on Commercial Components: An Experimental Comparison
- Tree-Based Grafting Approach for Bidirectional Motion Planning With Local Subsets Optimization
2024
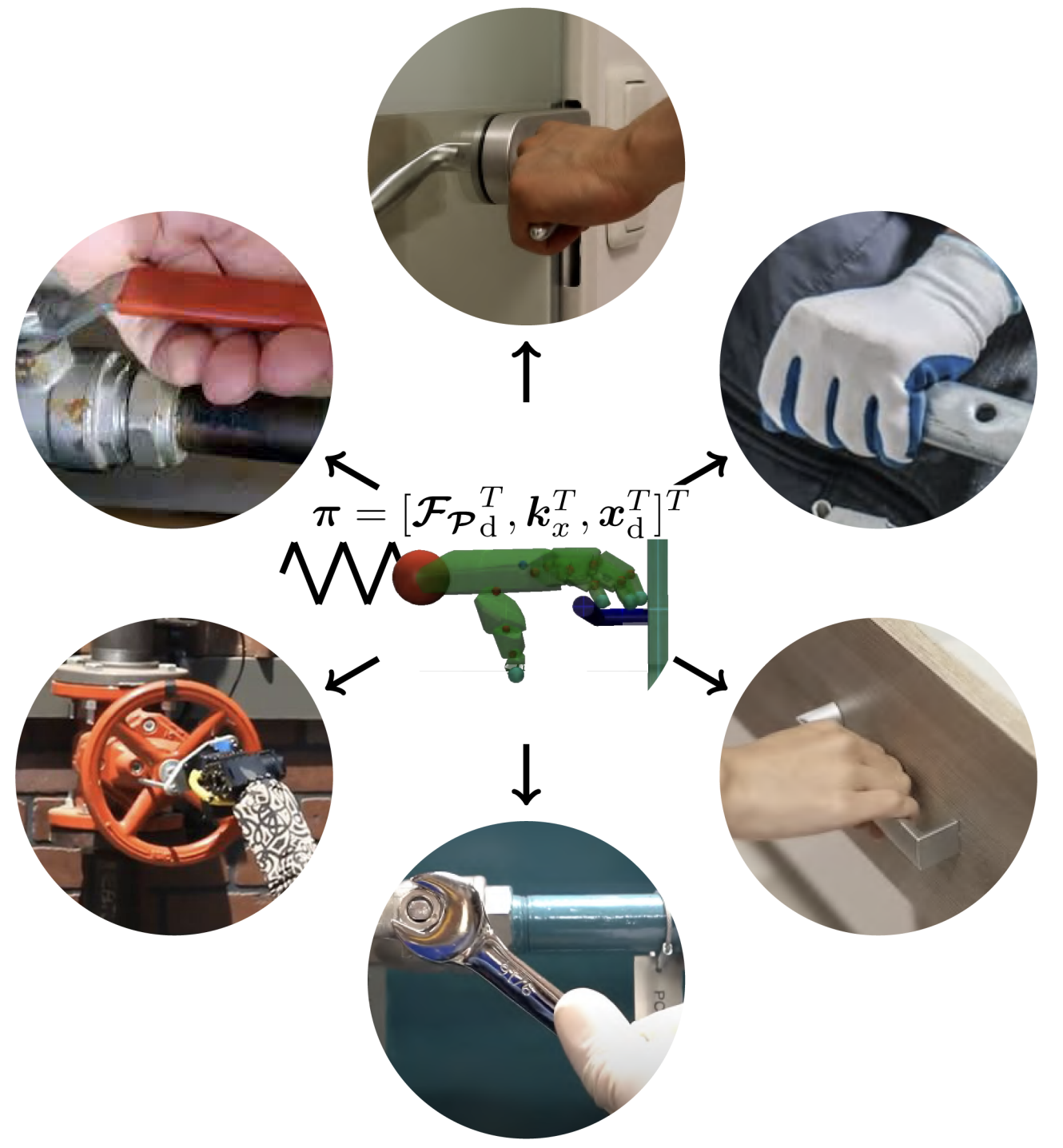
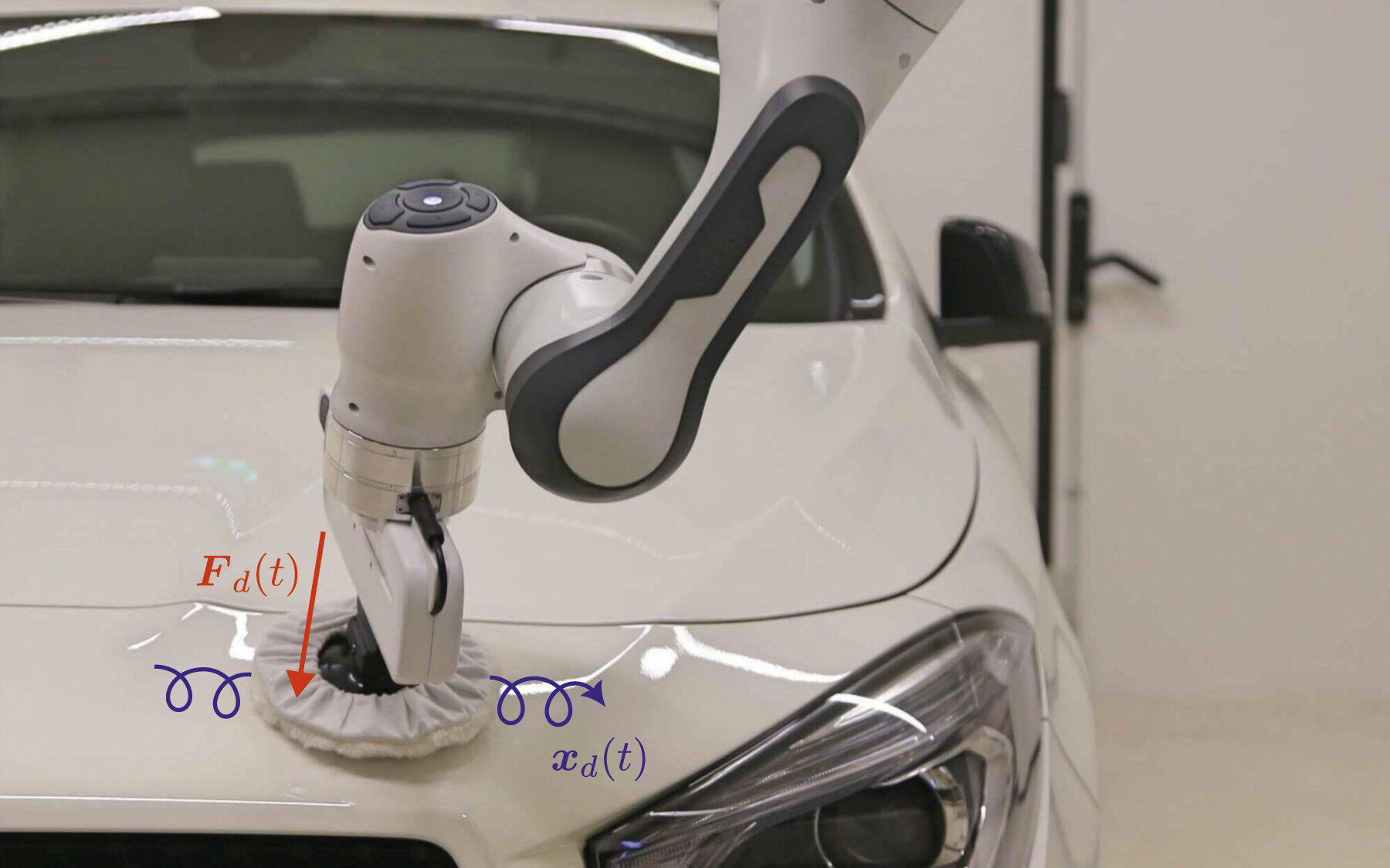
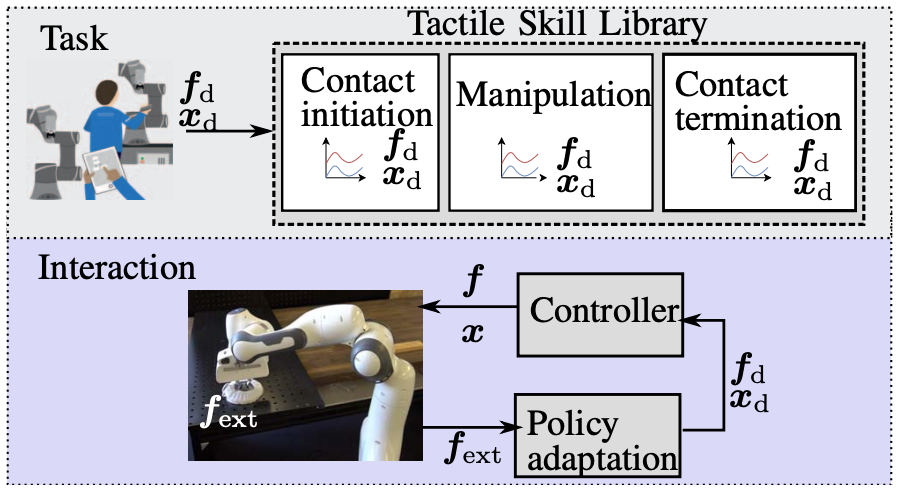
- Unified force-impedance control
- 1 kHz Behavior Tree for Self-adaptable Tactile Insertion
- A Scalable Platform for Robot Learning and Physical Skill Data Collection
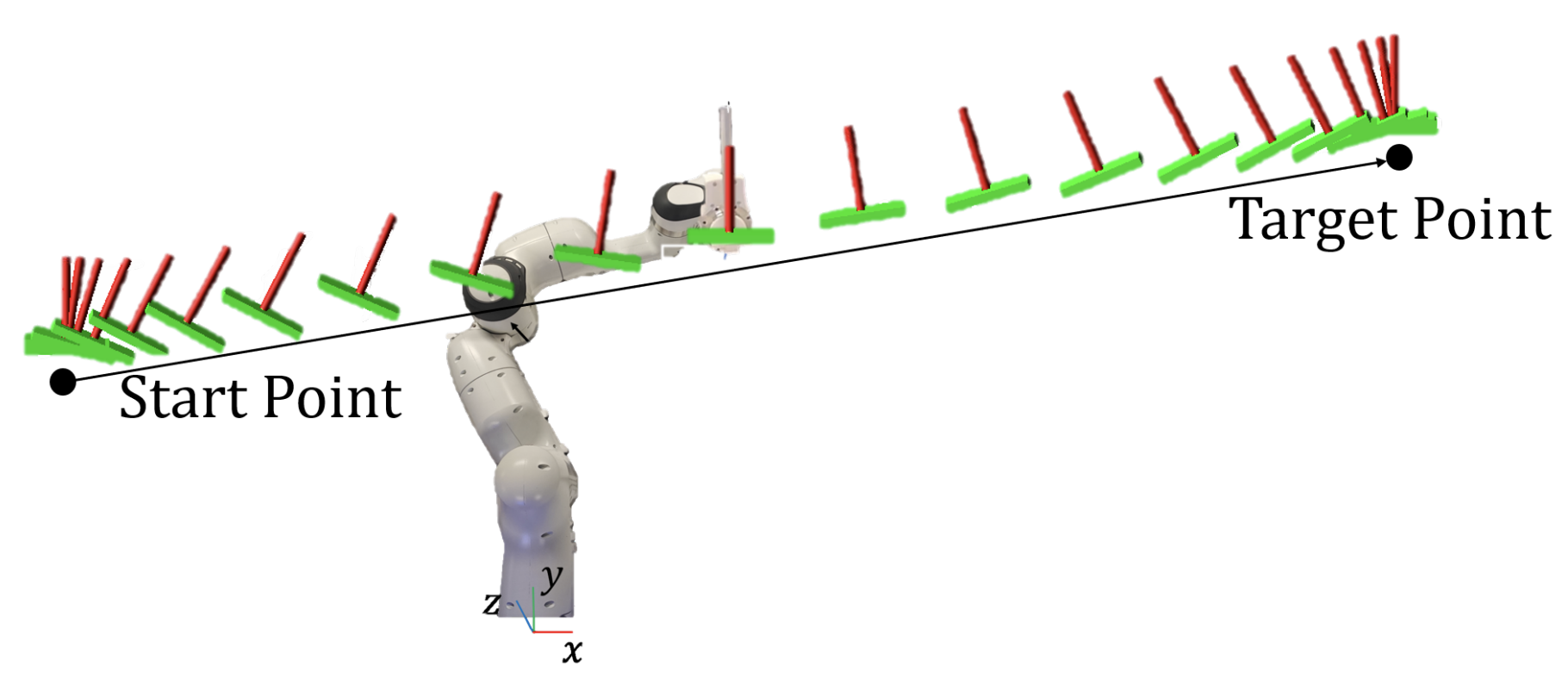
- An Optimization based Scheme for Real-time Transfer of Human Arm Motion to Robot Arm

- Autonomous swab robot for naso- and oropharyngeal COVID-19 screening

- Enhancing the Tracking Performance of Passivity-based High-Frequency Robot Cloud Control
- Identification and validation of the dynamic model of a tendon-driven anthropomorphic finger
- Motion Planning using Reactive Circular Fields: A 2D Analysis of Collision Avoidance and Goal Convergence
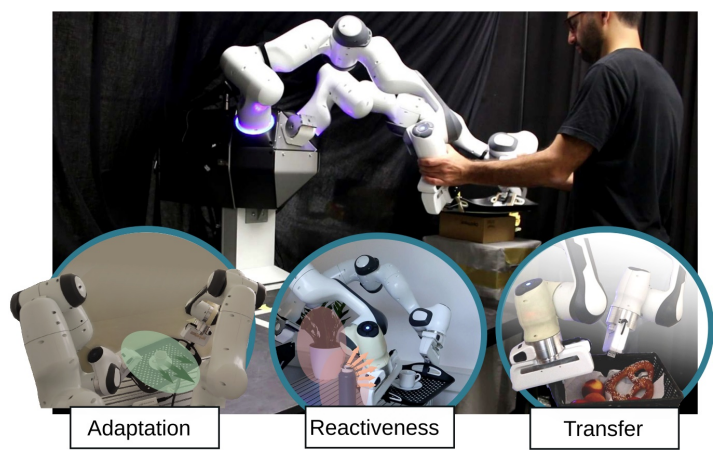
- Online Transfer and Adaptation of Tactile Skill: A Teleoperation Framework
- Optimal Control for Clutched-Elastic Robots: A Contact-Implicit Approach
- Path-Constrained Haptic Motion Guidance via Adaptive Phase-Based Admittance Control
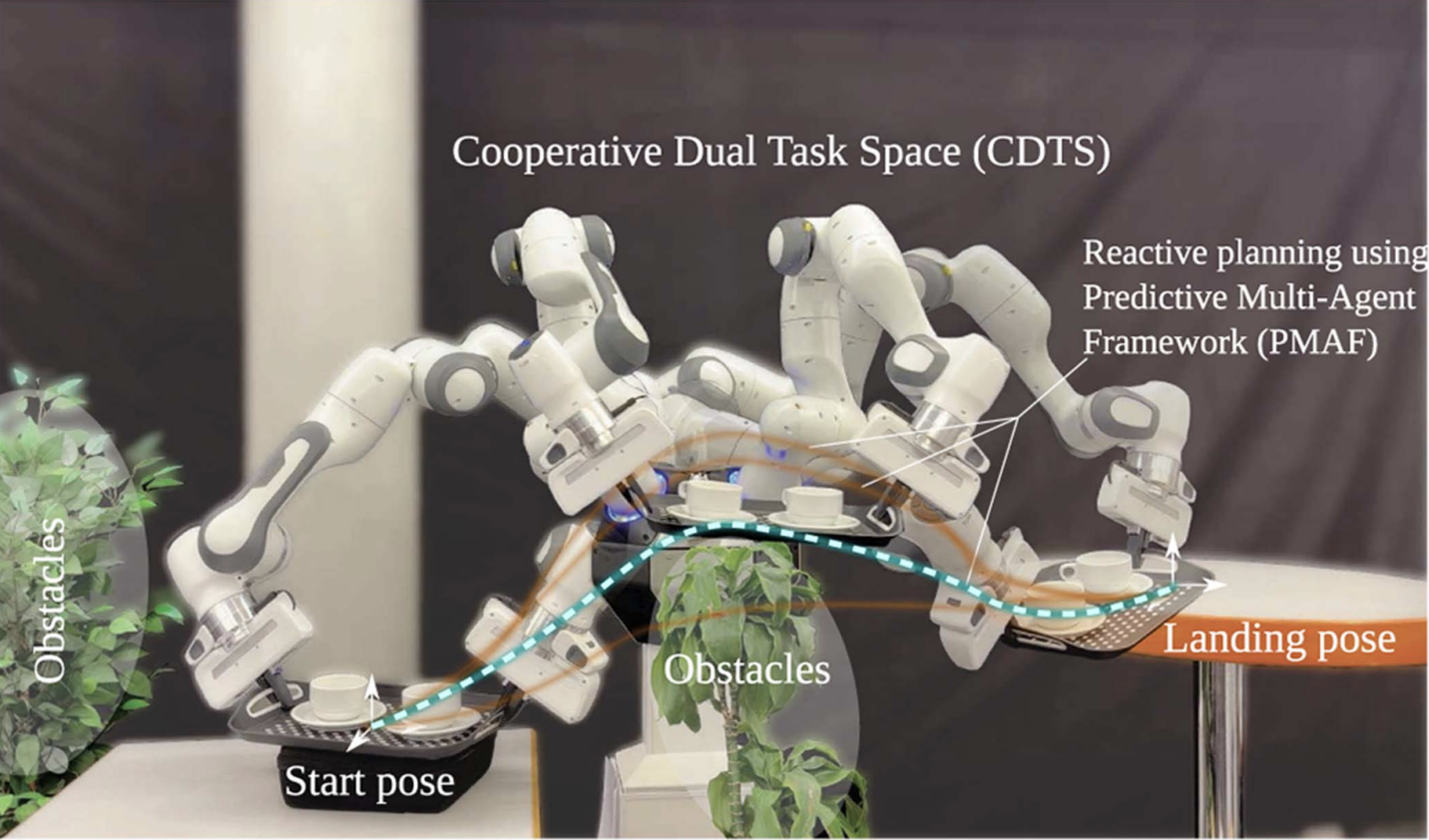
- Predictive Multi-Agent-Based Planning and Landing Controller for Reactive Dual-Arm Manipulation
- RETOM: Leveraging Maneuverability for Reactive Tool Manipulation using Wrench-Fields
- Safe Execution of Learned Orientation Skills with Conic Control Barrier Functions
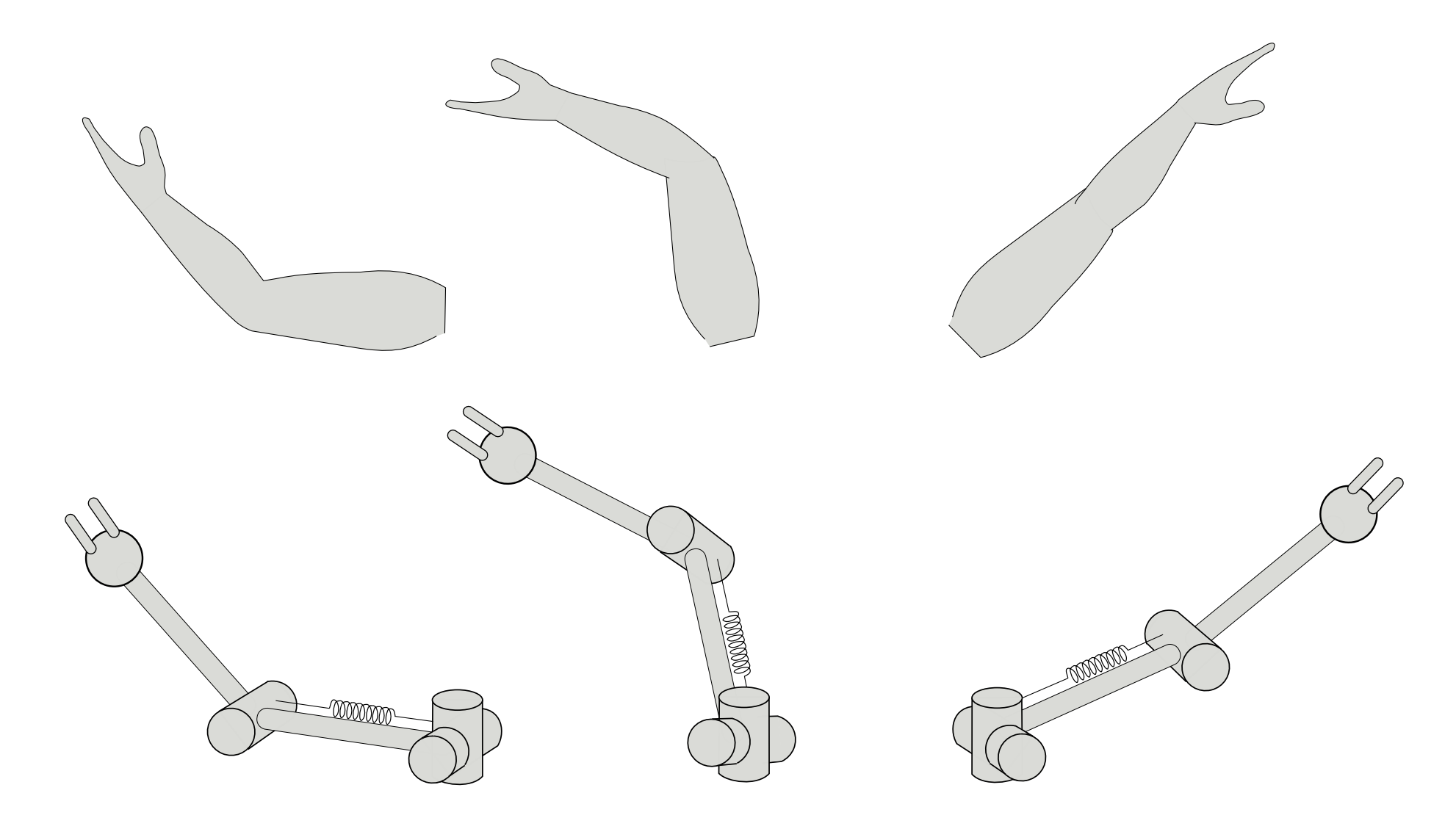
- The Fingertip Manipulability Assessment of Tendon-Driven Multi-Fingered Hands
- The Franka Emika Robot: A Standard Platform in Robotics Research

- The synergy complement control approach for seamless limb-driven prostheses
- Trajectory Planning for Non-Prehensile Object Transportation
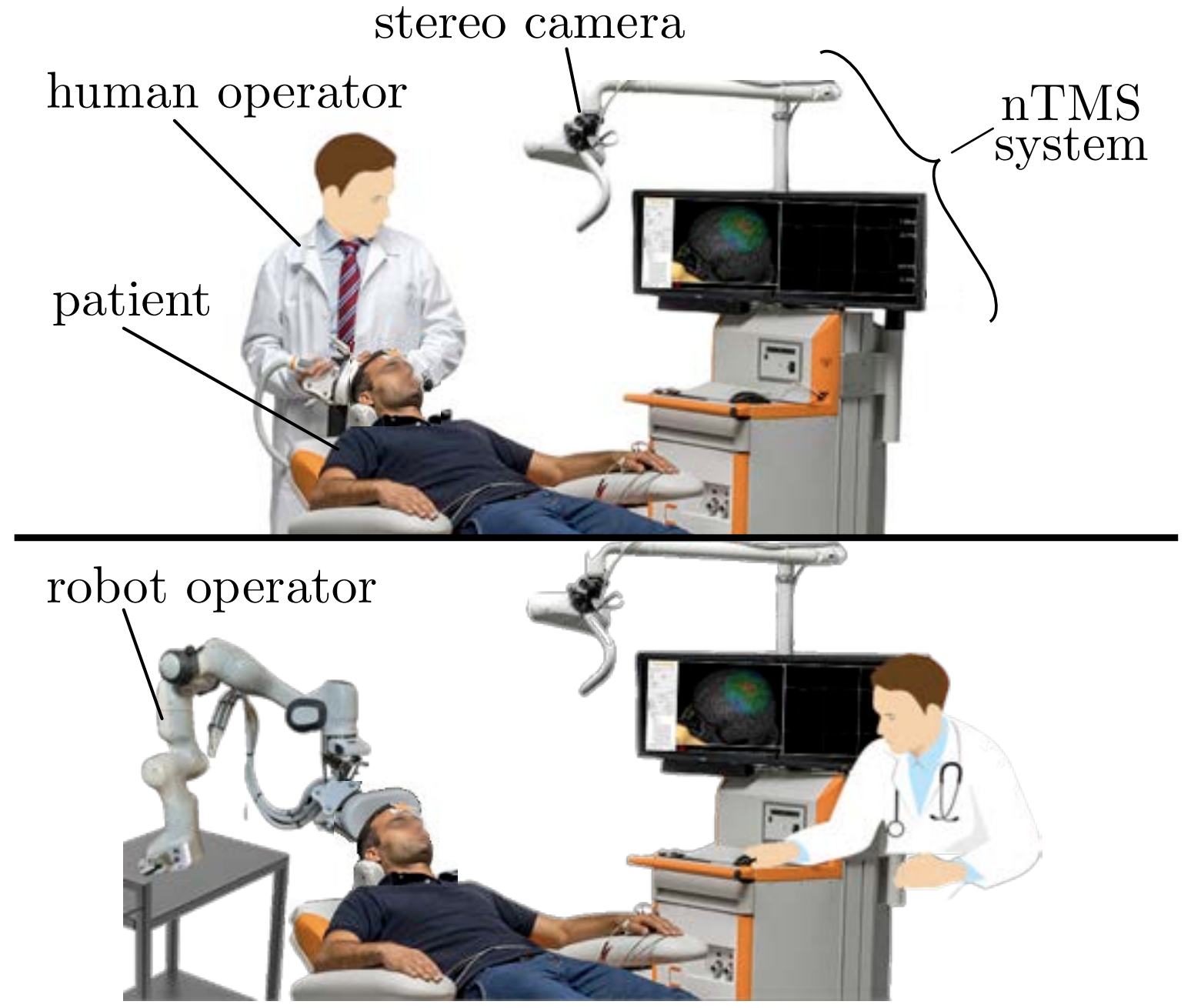
- Transcranial Magnetic Stimulation Robotic Assistant: towards a fully automated stimulation session
- Visuo-Tactile Exploration of Unknown Rigid 3D Curvatures by Vision-Augmented Unified Force-Impedance Control
2023
- Modularize-and-Conquer: A Generalized Impact Dynamics and Safe Pre-Collision Control Framework for Floating-base Tree-like Robots
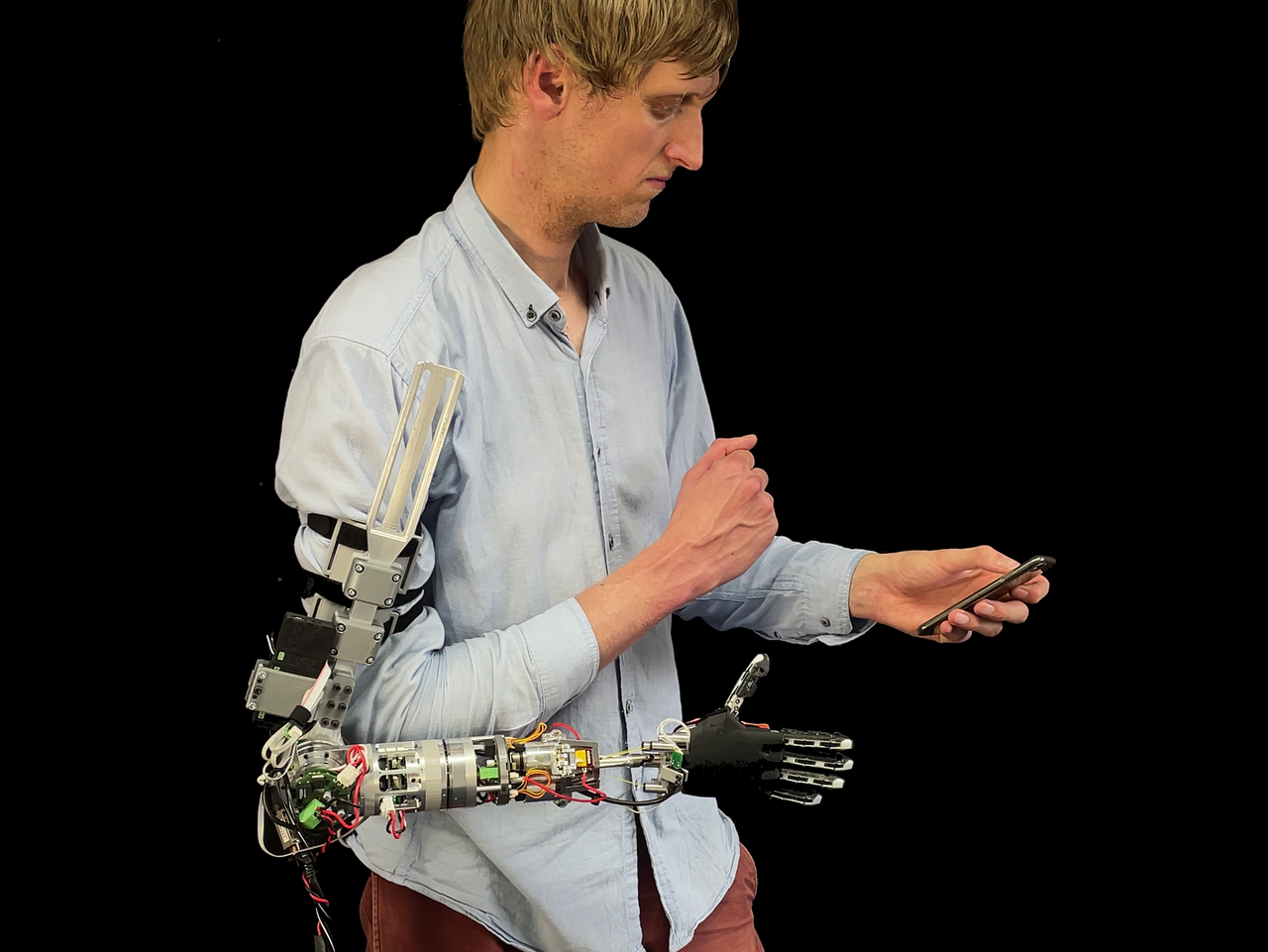
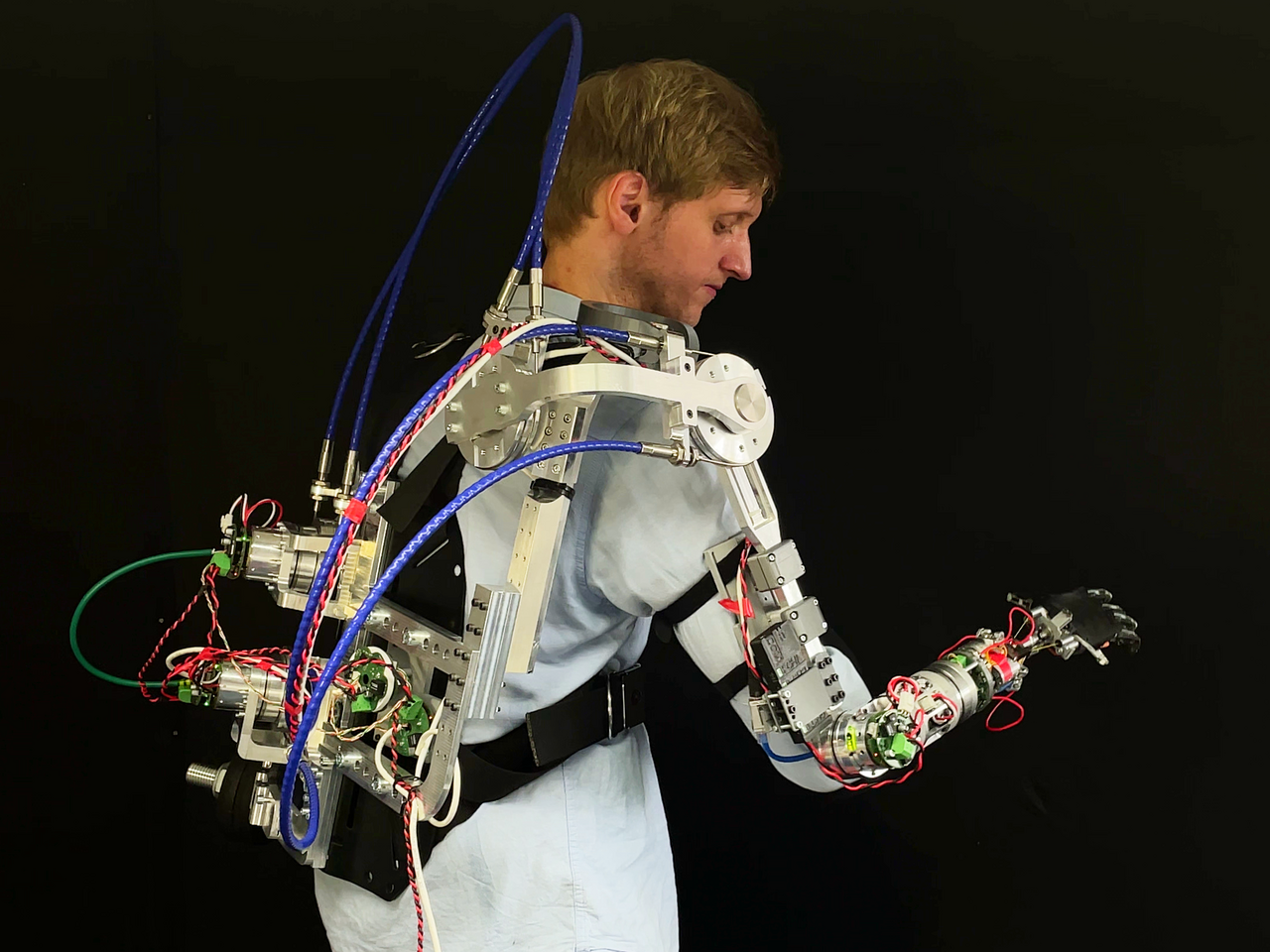
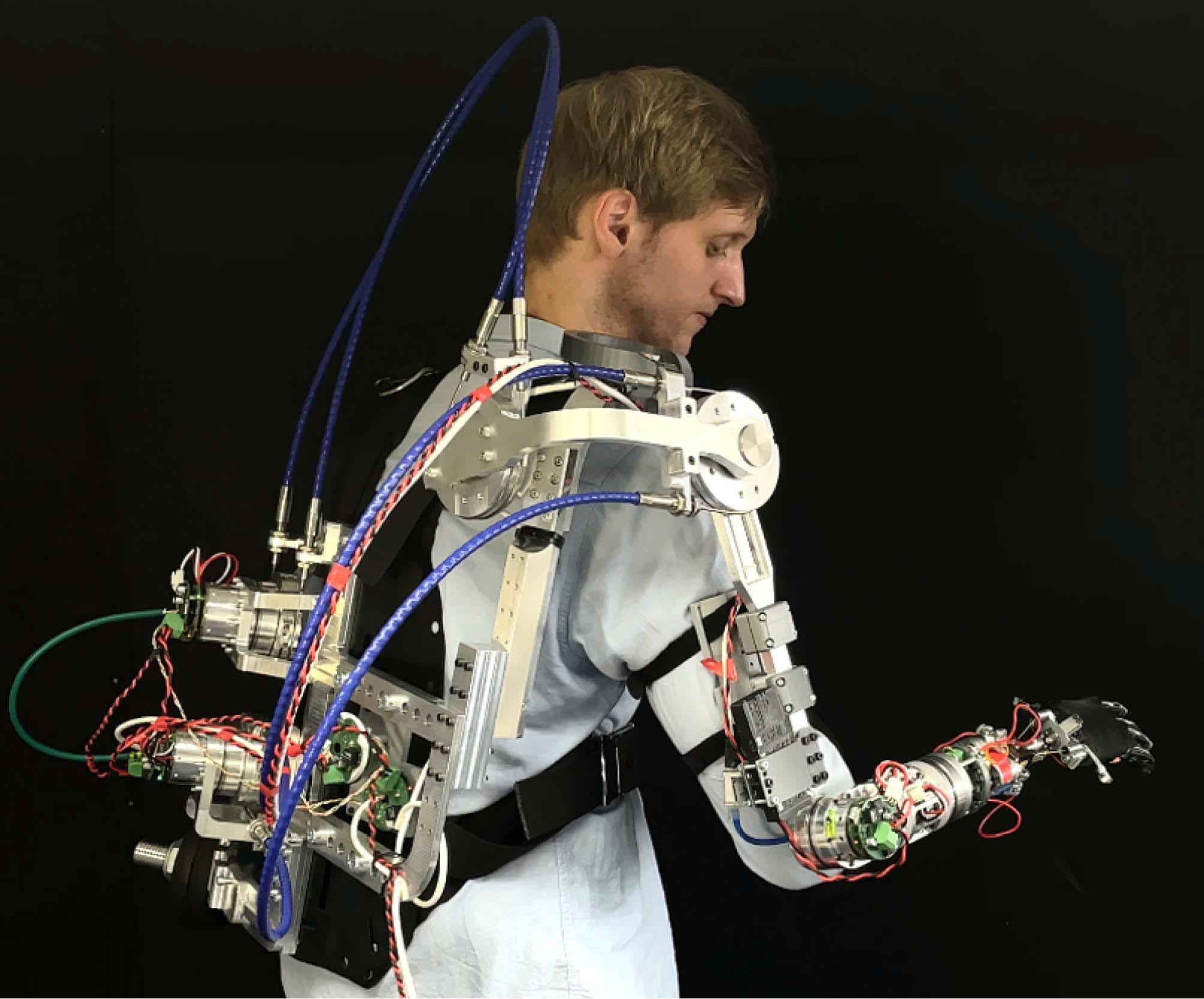
- A Wearable Force-Sensitive and Body-Aware Exoprosthesis
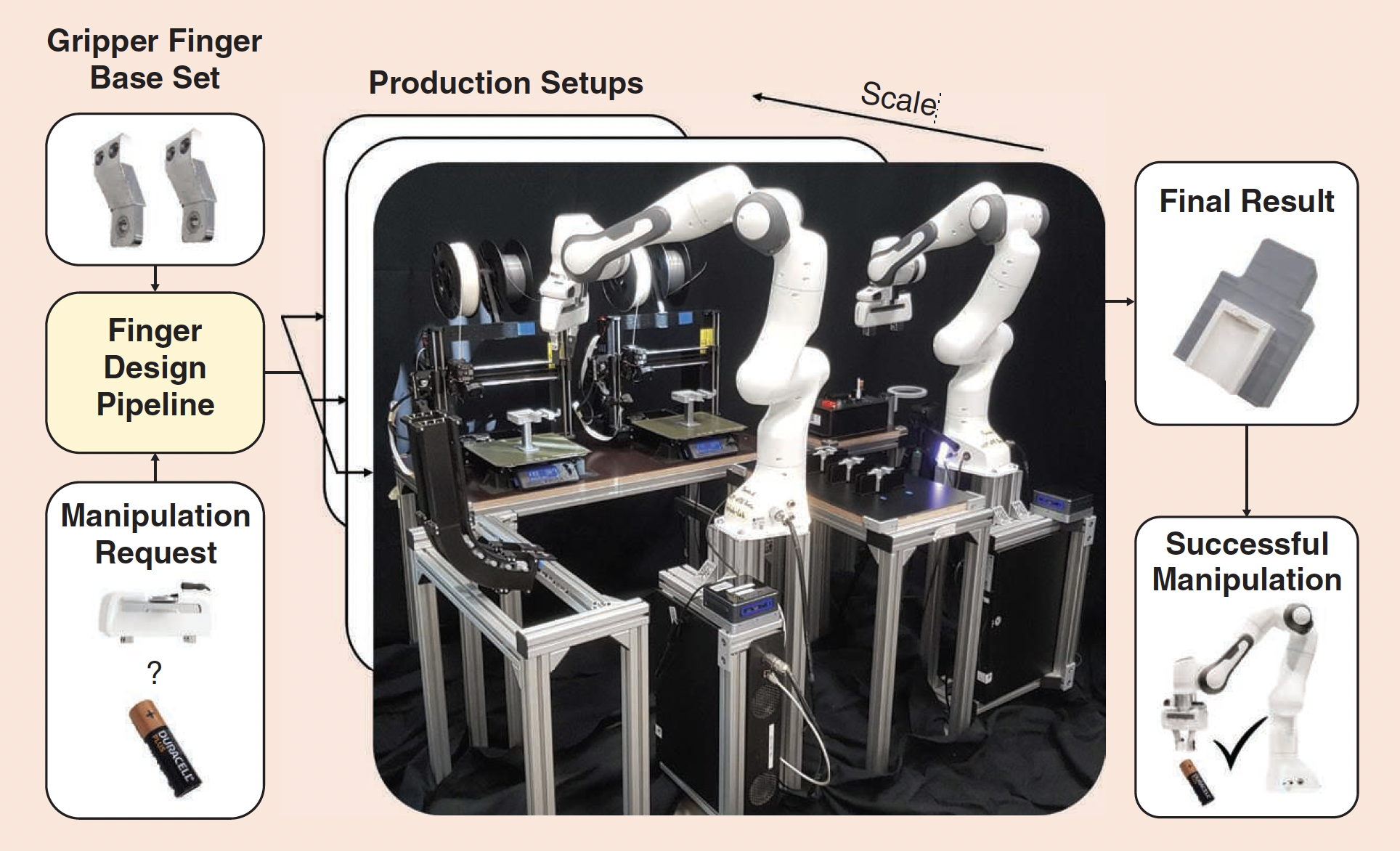
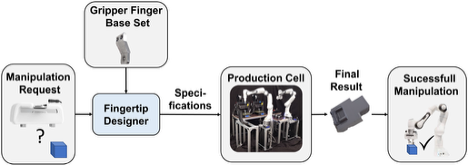
- Automatic Gripper-Finger Design, Production and Application
- Towards Task-Specific Modular Gripper Fingers
- A Passivity-based Approach on Relocating High-Frequency Robot Controller to the Edge Cloud
- Cross-coupling stiffness for natural goal-directed robot motion
- Fast yet predictable braking manoeuvers for real-time robot control
- I2mpedance - A Passivity Based Integrative Impedance Controller for Precise and Compliant Manipulation and Interaction
- Informed Circular Fields for Global Reactive Obstacle Avoidance of Robotic Manipulators
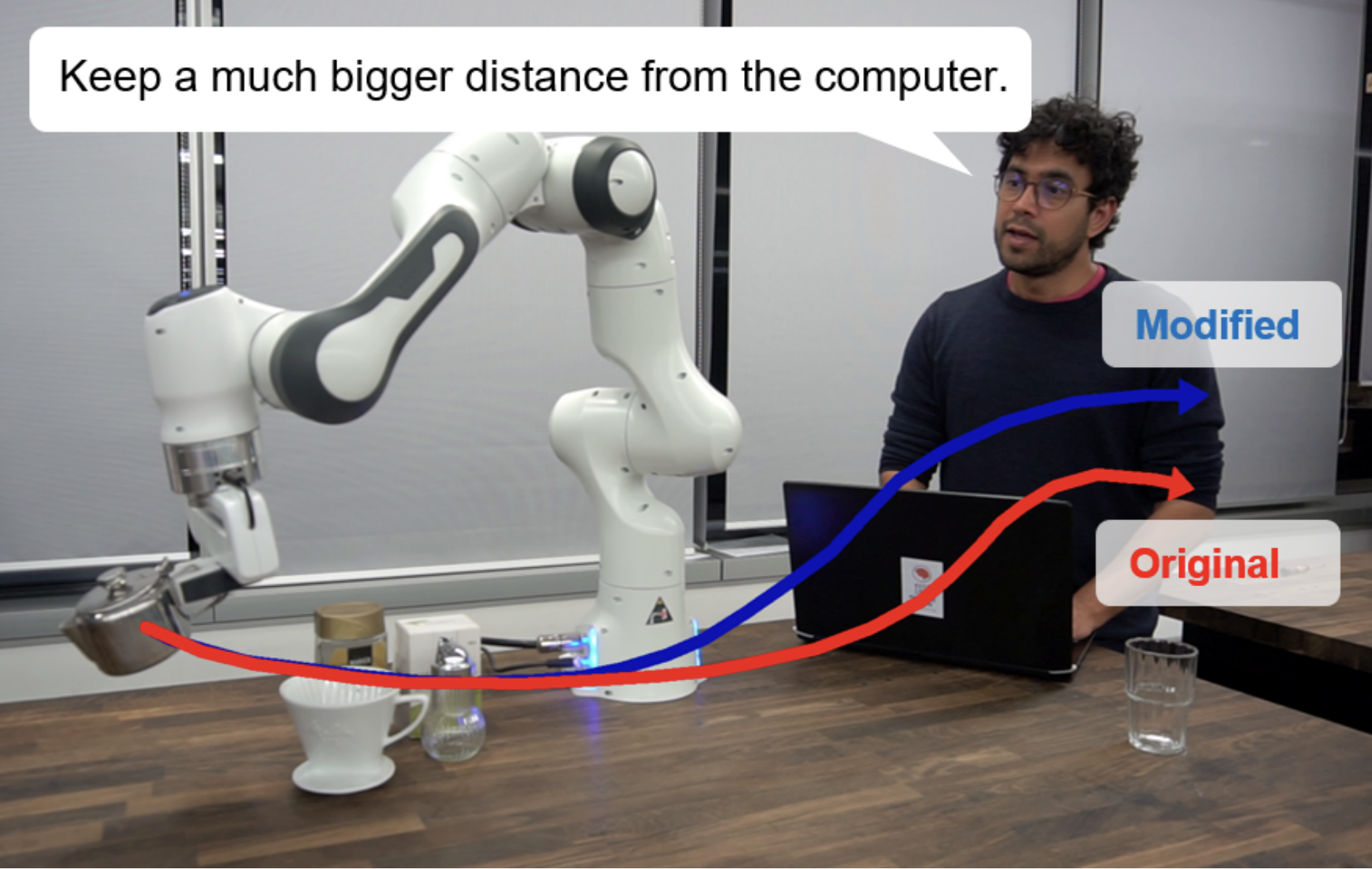
- LATTE: LAnguage Trajectory TransformEr
- Learning optimal controllers: A dynamical motion primitive approach
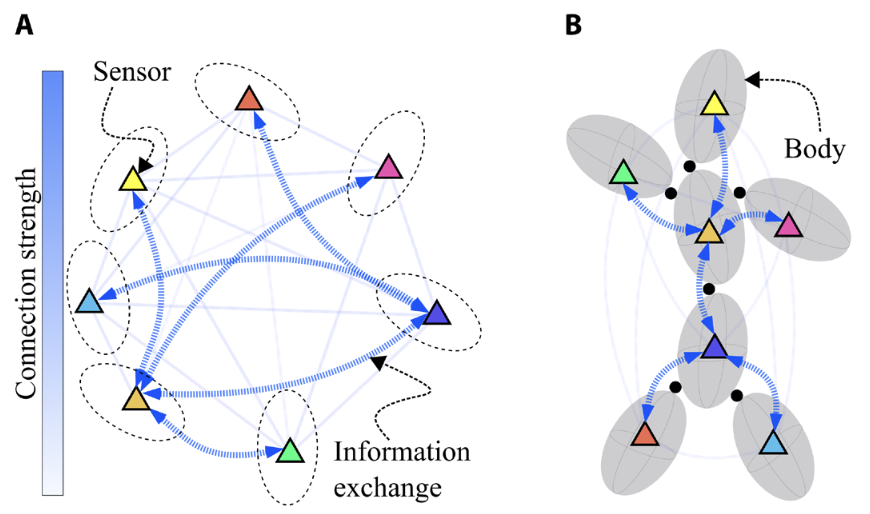
- Machine learning–driven self-discovery of the robot body morphology
- Optimally Controlling the Timing of Energy Transfer in Elastic Joints: Experimental Validation of the Bi-Stiffness Actuation Concept
- S*: On Safe and Time Efficient Robot Motion Planning
- Shared Autonomy Control for Slosh-Free Teleoperation
- Soft Sensing Skins for Arbitrary Objects: An Automatic Framework
- Tactile Exploration Using Unified Force-Impedance Control
- The next Evolution of Artificial Sense of Touch
- Towards Automated End-to-End Control for Holotomography Microscopy
2022
- Tactile Robotic Telemedicine for Safe Remote Diagnostics
- Passivity-Based Adaptive Force-Impedance Control for Modular Multi-Manual Object Manipulation

- The Franka Emika Robot
- A Solution to Slosh-free Robot Trajectory Optimization

- A-RIFT: Visual Substitution of Force Feedback for a Zero-Cost Interface in Telemanipulation
- Development of a Collaborative Wheeled Mobile Robot: Design Considerations, Drive Unit Torque Control, and Preliminary Result
- Integrated Bi-Manual Motion Generation and Control shaped for Probabilistic Movement Primitives
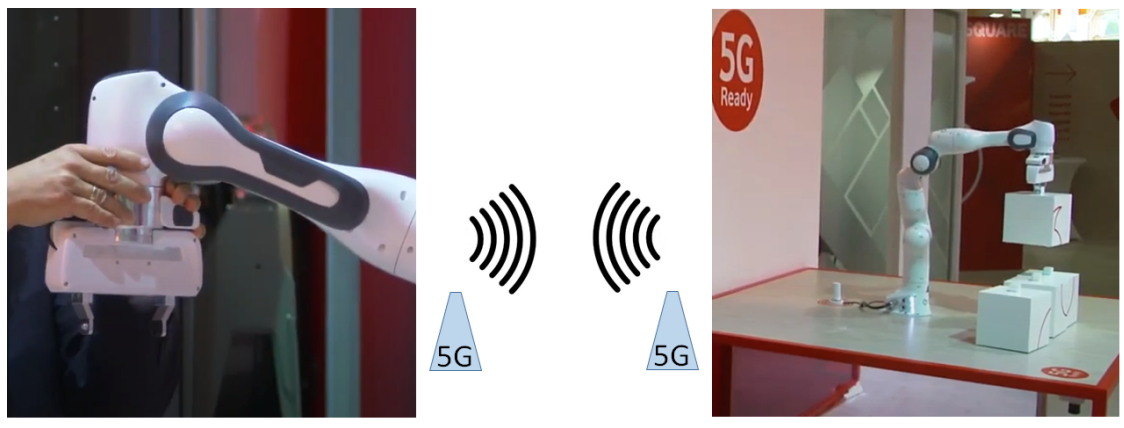
- On the Communication Channel in Bilateral Teleoperation: An Experimental Study for Ethernet, WiFi, LTE and 5G
- Passivity-Based Skill Motion Learning in Stiffness-Adaptive Unified Force-Impedance Control
2021
- Multi-Level Structure vs. End-to-End-Learning in High-Performance Tactile Robotic Manipulation
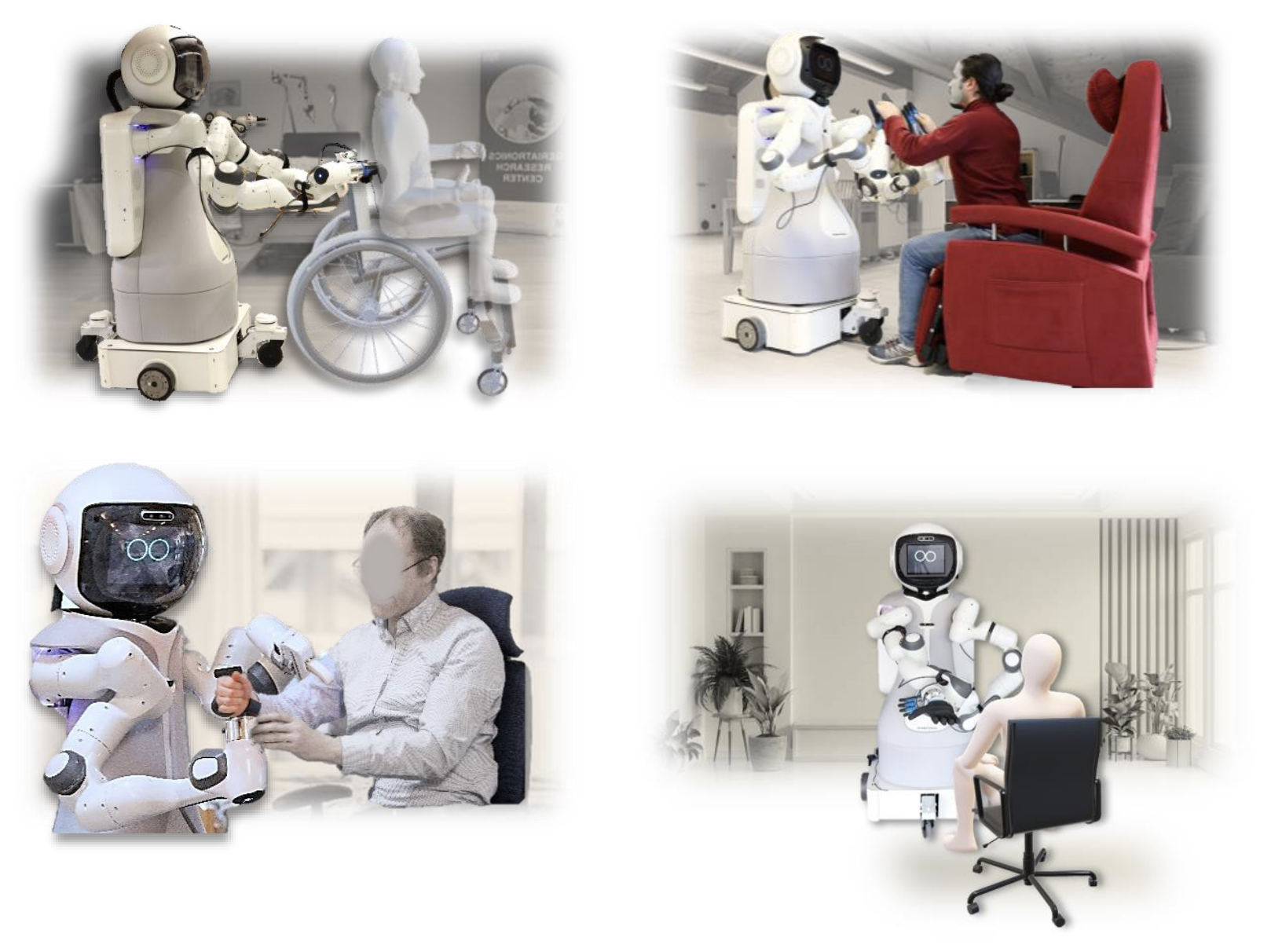
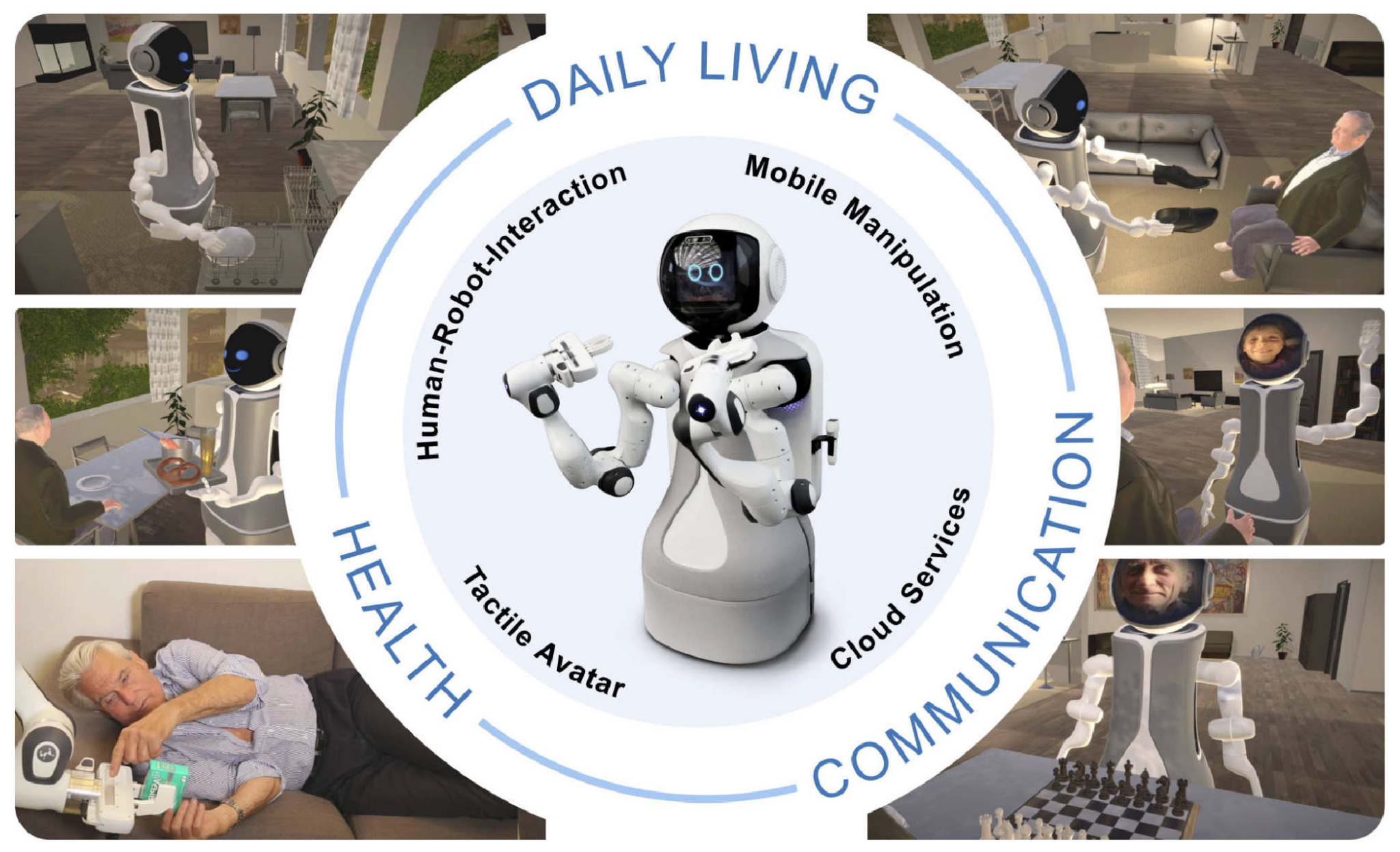
- Introducing GARMI - A Service Robotics Platform to Support the Elderly at Home
- Circular Fields and Predictive Multi-Agents for Online Global Trajectory Planning
- Arm movement adaptation to concurrent pain constraints
- A Dual Doctor-Patient Twin Paradigm for Transparent Remote Examination, Diagnosis, and Rehabilitation
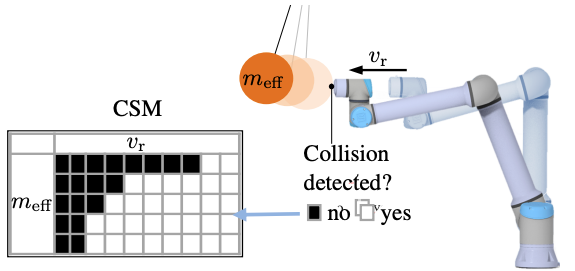
- CSM: Contact Sensitivity Maps for Benchmarking Robot Collision Handling Systems
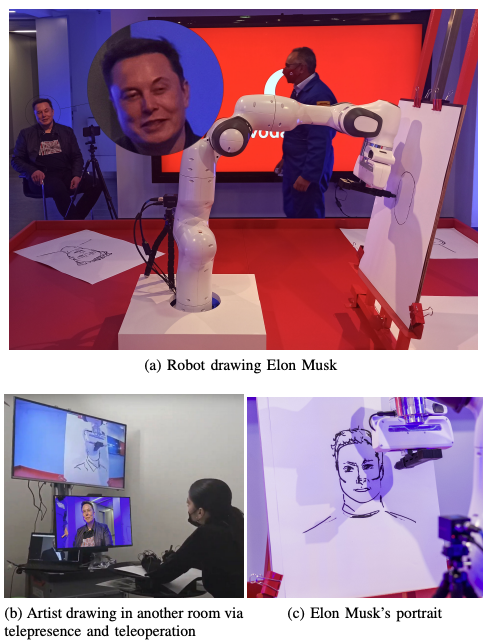
- Drawing Elon Musk: A Robot Avatar for Remote Manipulation
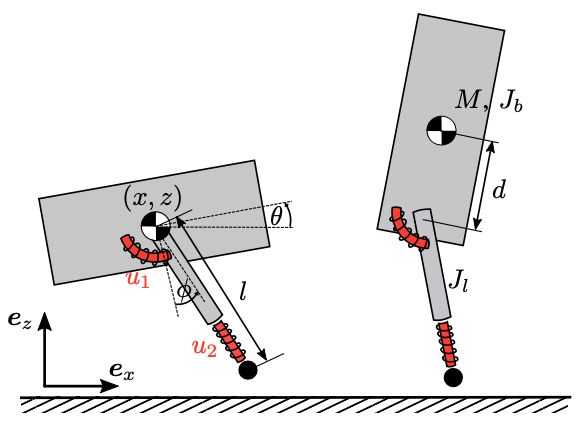
- Nonlinear stiffness allows passive dynamic hopping for one-legged robots with an upright trunk
- Reactive Cooperative Manipulation based on Set Primitives and Circular Fields
- RIL: Riemannian Incremental Learning of the Inertial Properties of the Robot Body Schema
- Rm-Code: Proprioceptive Real-Time Recursive Multi-Contact Detection, Isolation and Identification
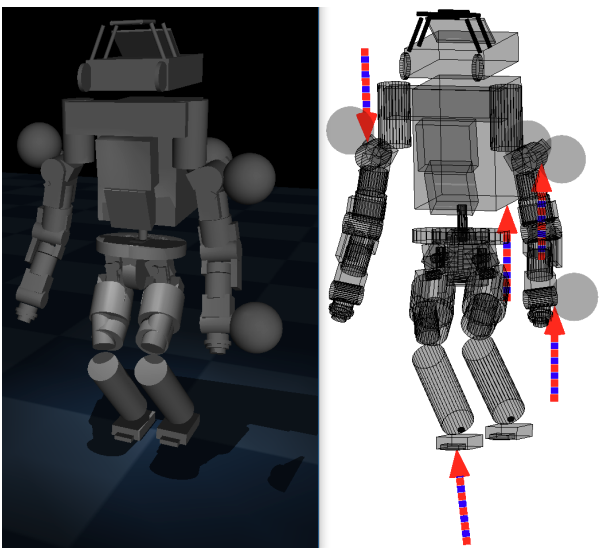
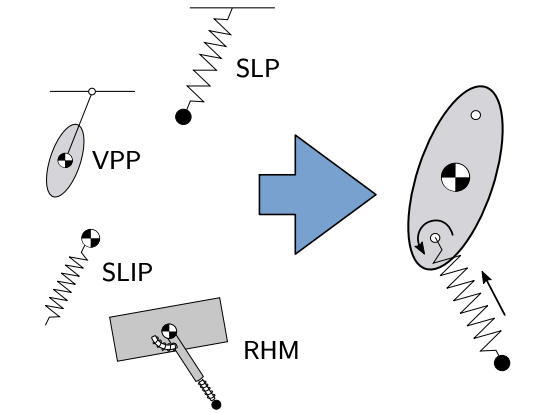
- ULT-model: Towards a one-legged unified locomotion template model for forward hopping with an upright trunk
2019

2018
2017
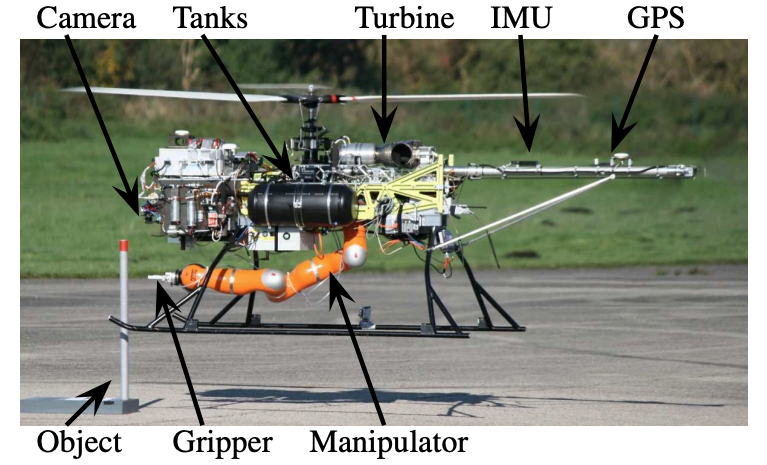
- External Wrench Estimation, Collision Detection, and Reflex Reaction for Flying Robots
- Robot Collisions: A Survey on Detection, Isolation, and Identification
- First-Order-Principles-Based Constructive Network Topologies: An Application to Robot Inverse Dynamics
- Towards Interaction, Disturbance and Fault Aware Flying Robot Swarms
2015
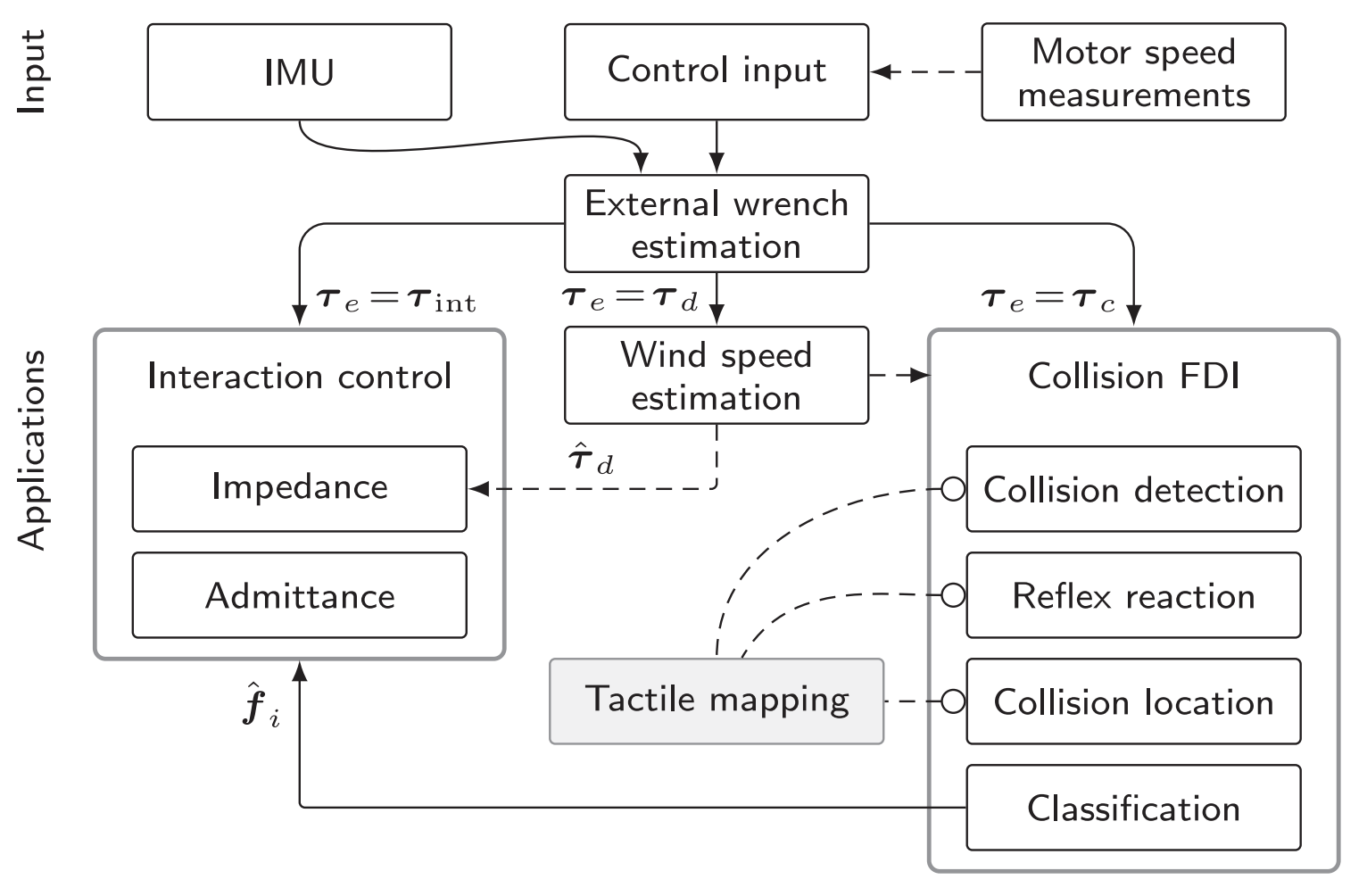
- Simultaneous estimation of aerodynamic and contact forces in flying robots: Applications to metric wind estimation and collision detection
- Unified passivity-based Cartesian force/impedance control for rigid and flexible joint robots via task-energy tanks

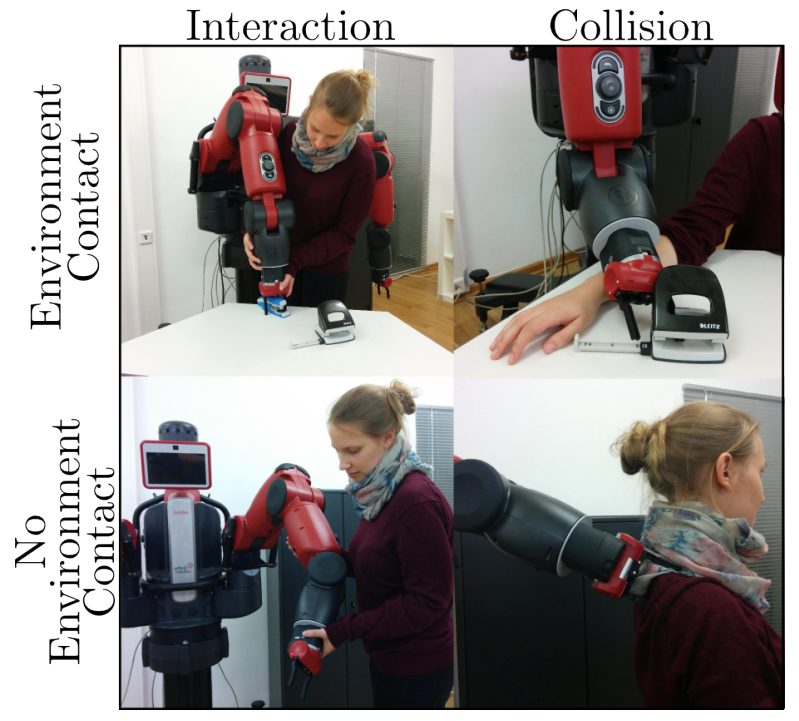
- Using tactile sensation for learning contact knowledge: Discriminate collision from physical interaction
2014
- A unified framework for external wrench estimation, interaction control and collision reflexes for flying robots
- Towards Safe Robots - Approaching Asimov’s 1st Law
- Collision avoidance with potential fields based on parallel processing of 3D-point cloud data on the GPU
- Learning quadrotor maneuvers from optimal control and generalizing in real-time
2013
2012
- On making robots understand safety: Embedding injury knowledge into control

- A versatile biomimetic controller for contact tooling and haptic exploration
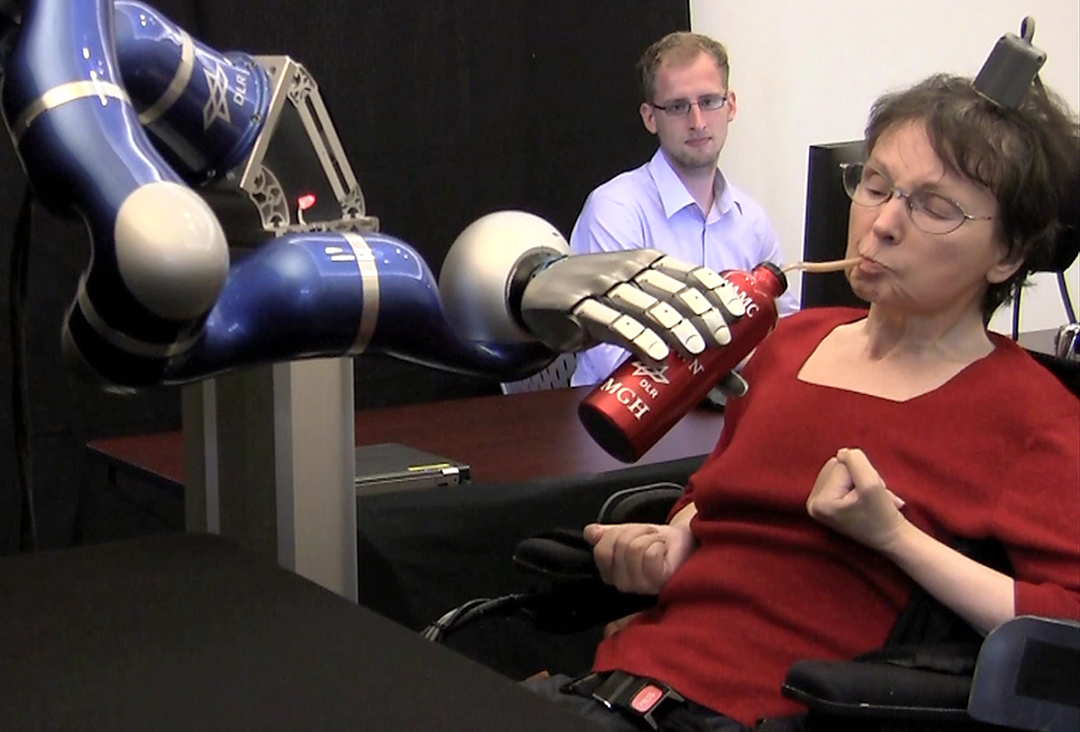
- Reach and grasp by people with tetraplegia using a neurally controlled robotic arm
- On impact decoupling properties of elastic robots and time optimal velocity maximization on joint level
- Optimal control for exploiting the natural dynamics of variable stiffness robots
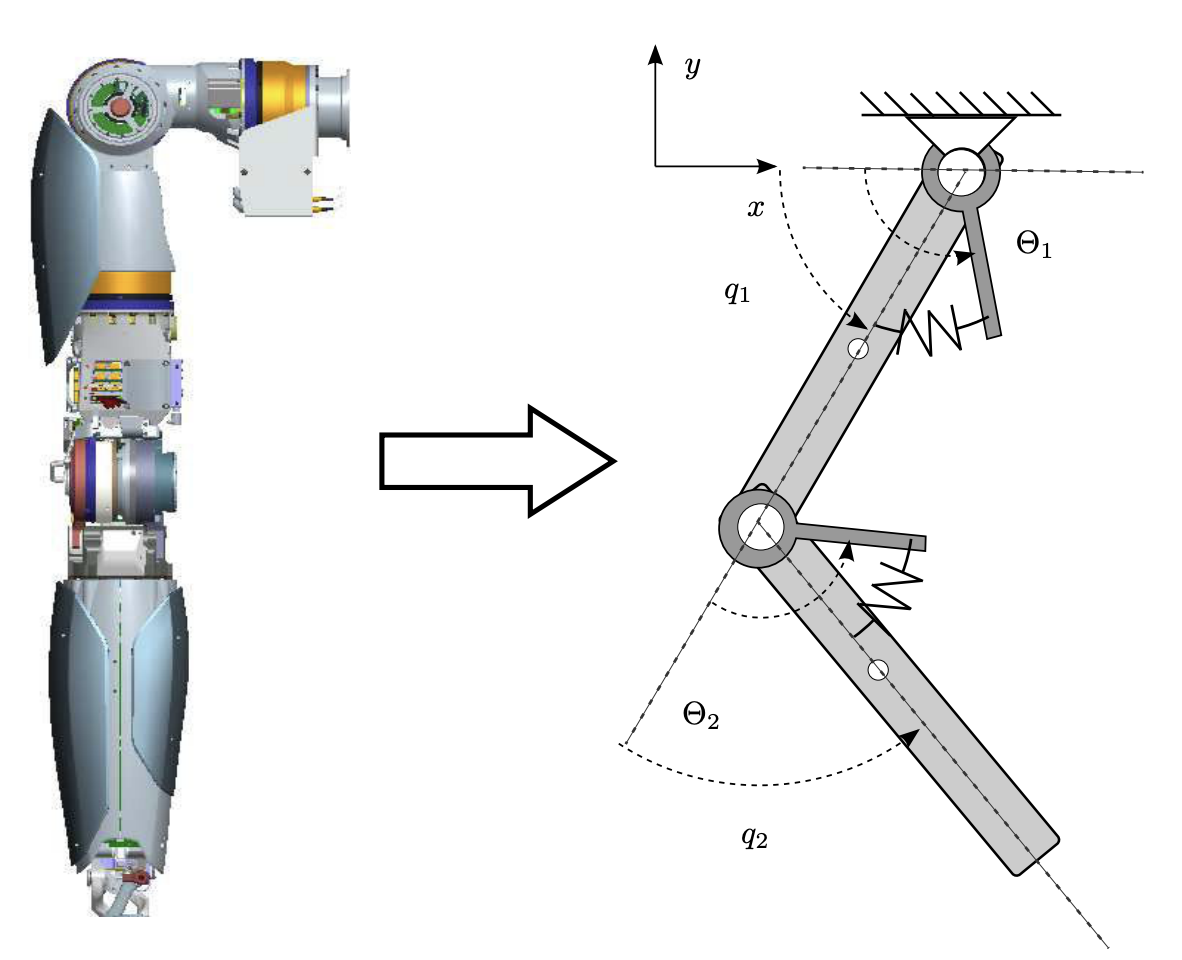
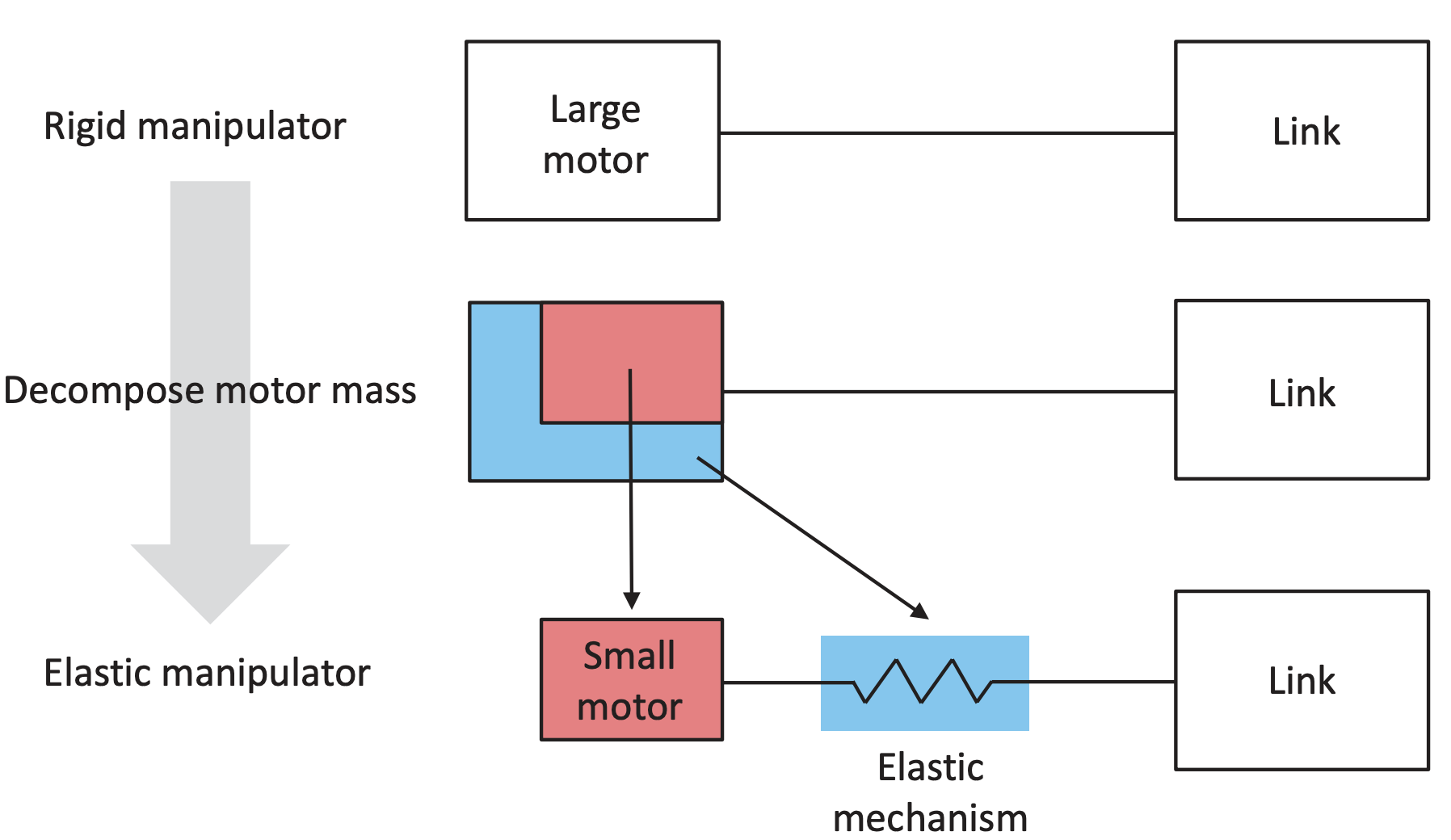
- Rigid vs. elastic actuation: Requirements & performance
2011
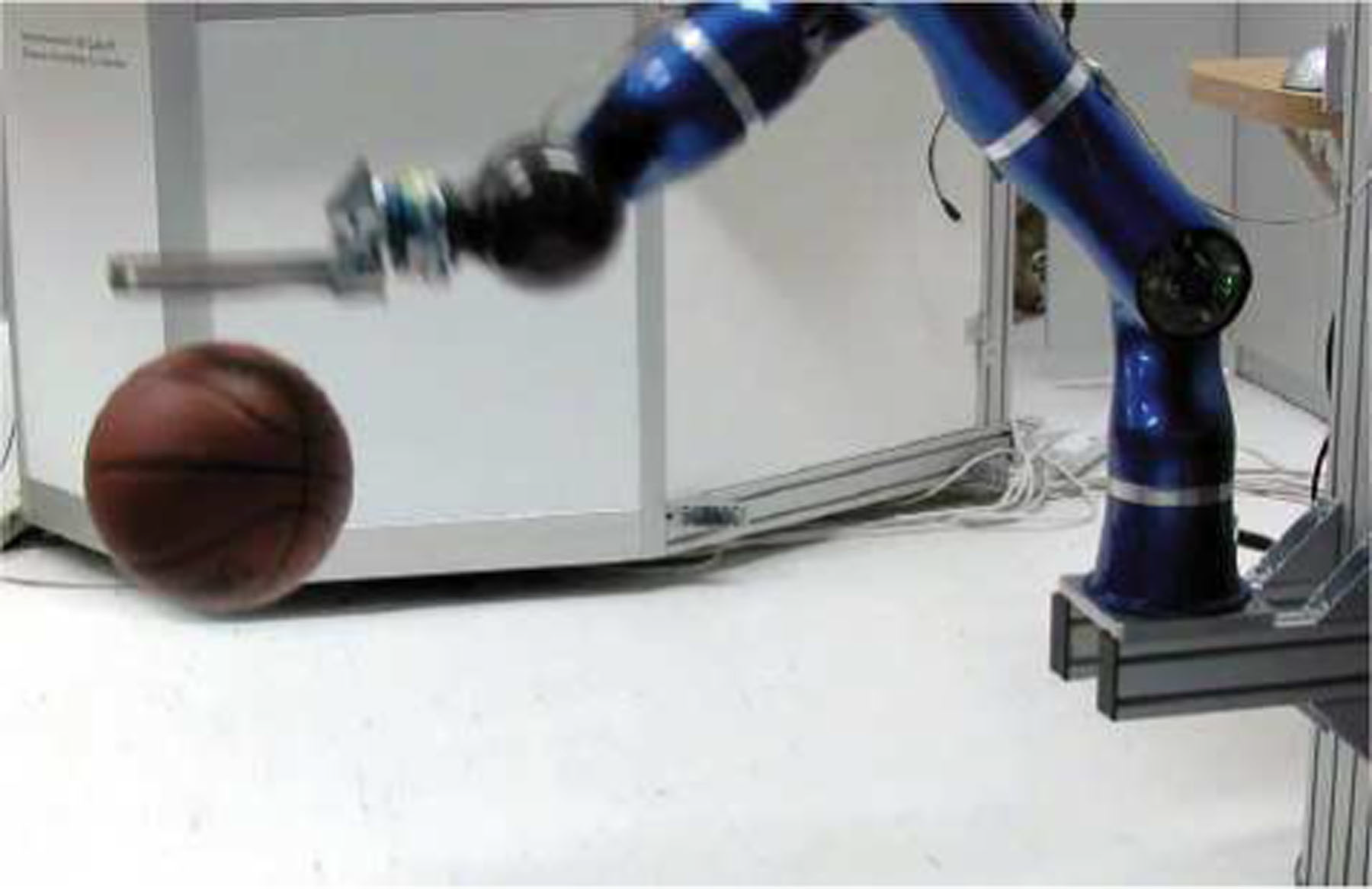
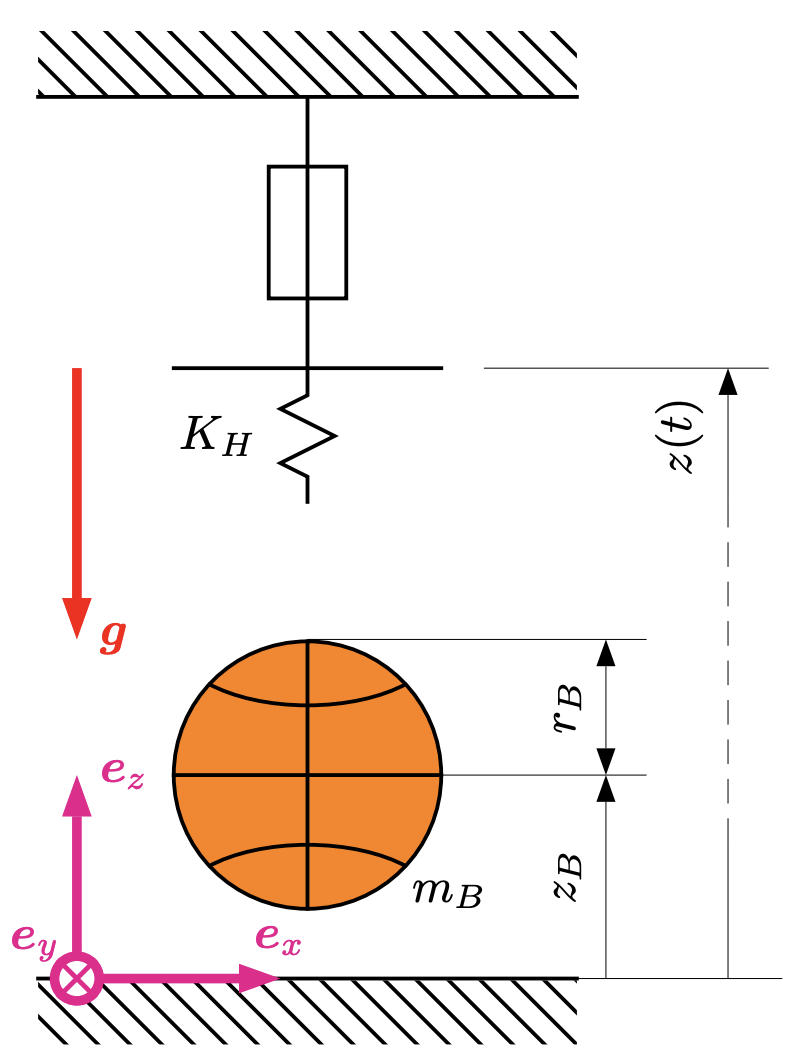
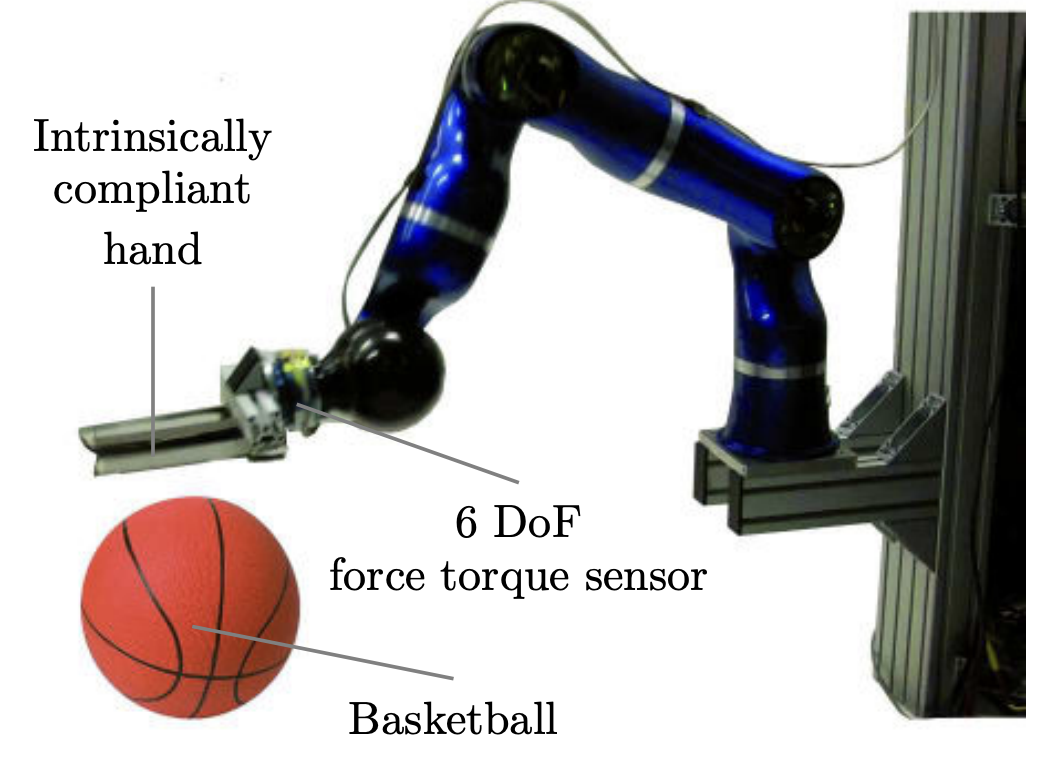
- Exploiting elastic energy storage for cyclic manipulation: Modeling, stability, and observations for dribbling
- Human-like adaptation of force and impedance in stable and unstable interactions
- Exploiting potential energy storage for cyclic manipulation: An analysis for elastic dribbling with an anthropomorphic robot
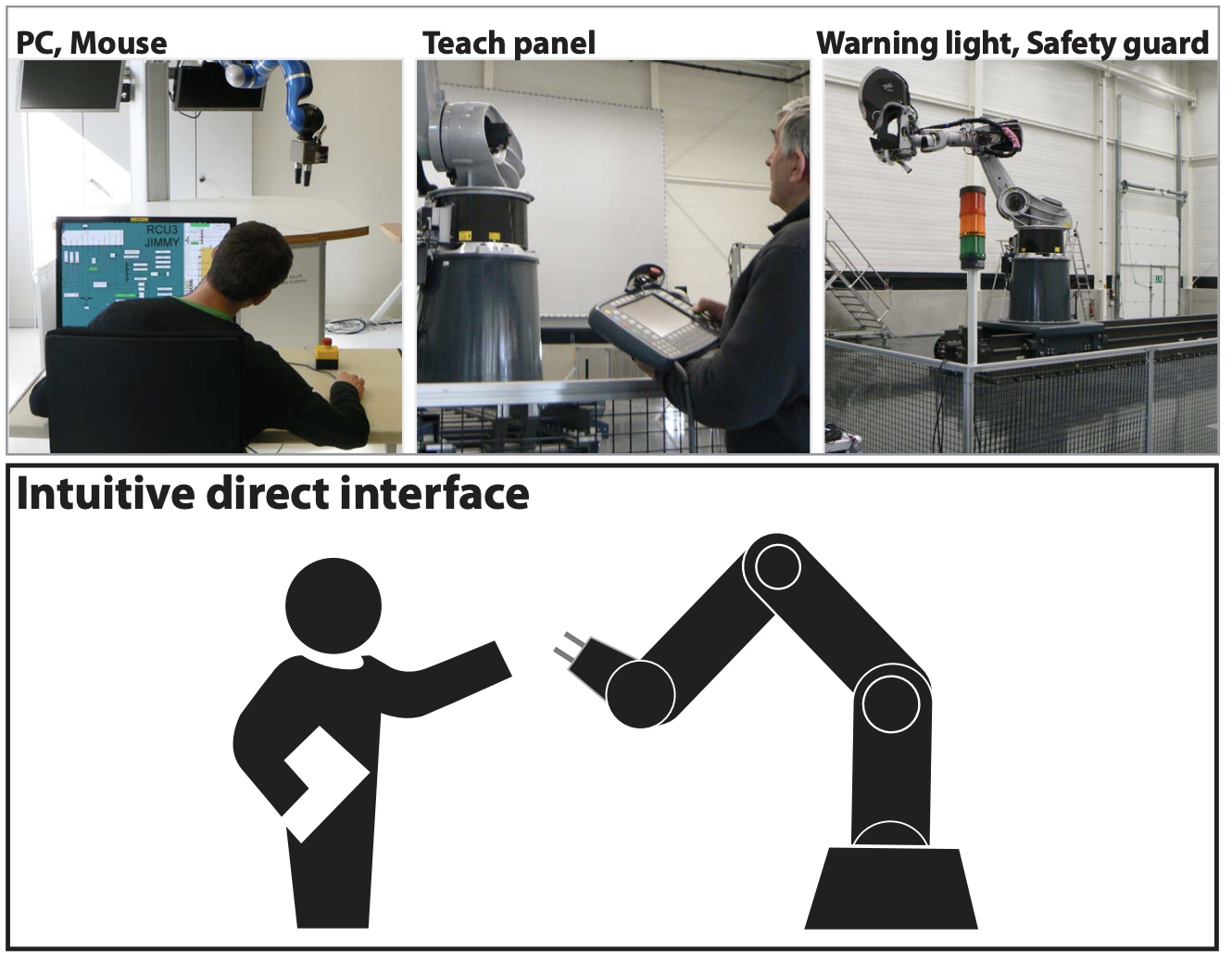
- A human-centered approach to robot gesture based communication within collaborative working processes
- Dynamic motion planning for robots in partially unknown environments

- Modular state-based behavior control for safe human-robot interaction: A lightweight control architecture for a lightweight robot
- Optimal control for maximizing link velocity of robotic variable stiffness joints
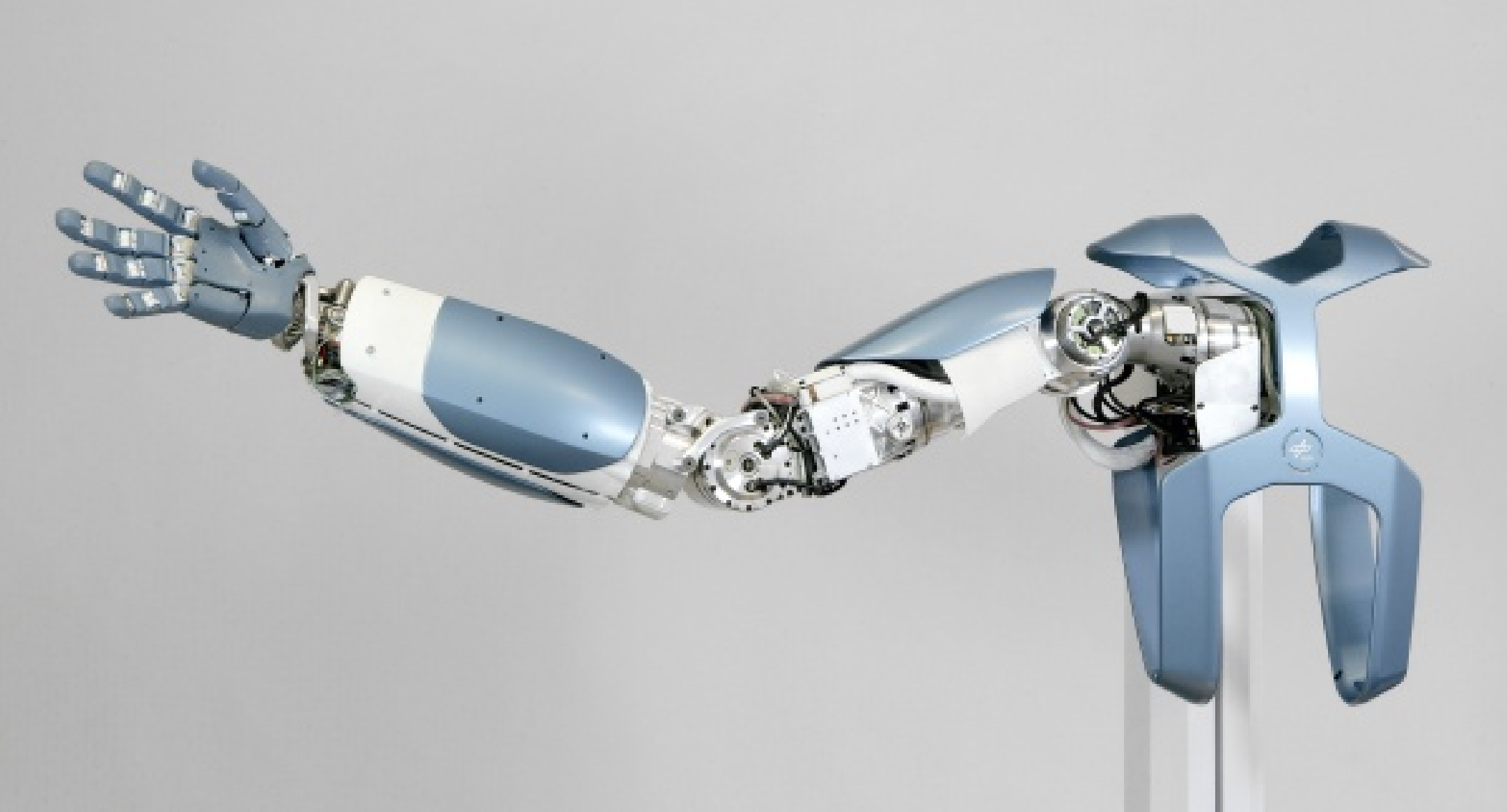
- The DLR hand arm system
2010
- Soft-Tissue Injury in Robotics
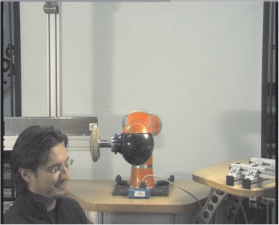
- Continuous Control of the DLR Light-Weight Robot III by a human with tetraplegia using the BrainGate2 Neural Interface System
- Continuous Control of the DLR Light-Weight Robot III by a Human with Tetraplegia Using the BrainGate2 Neural Interface System
- New insights concerning intrinsic joint elasticity for safety
- The KUKA-DLR Lightweight Robot arm - a new reference platform for robotics research and manufacturing

2009
2008
- Injury evaluation of human-robot impacts
- The role of the robot mass and velocity in physical human-robot interaction - Part I: Non-constrained blunt impacts
- The role of the robot mass and velocity in physical human-robot interaction - Part II: Constrained blunt impacts
- Collision detection and reaction: A contribution to safe physical human-robot interaction