
Etienne Burdet
(image credit: Human Robotics)
Biography
Dr. Etienne Burdet (MS Mathematics, MS Physics, PhD, ETH-Zurich) is Chair in Human Robotics at Imperial College London and a Honorary Professor at University College London. He uses an integrative approach of neuroscience and robotics to investigate human motor control, and to design efficient assistive devices and training systems for neuro-rehabilitation, which are tested in clinical trials and commercialized (e.g. gripable.co, Myro@tyromotion.com). In the last 5 years, he has attracted funding for over 3M£, and published over 75 papers in top robotics, neuroscience and rehabilitation technology journals. According to Google scholar, his papers have been cited over 23000 times, with an H-index of 69. Recent awards include the 2015 UK NHS Innovation Challenge Prize, the 2011 best paper award of the IEEE Transactions on Robotics, and the 2009 Apple Research & Technology Support award. Dr. Burdet is or was a PI in 15 European FP7 and H2020 projects, and workpackage leader in two European COST Action networks. Alumni of his group (with over 30 PhD students and over 30 postdoctoral researchers) have taken faculty positions at leading universities and research institutes such as ETHZ (Switzerland), Tokyo Institute of Technology (Japan), University of Waterloo (Canada), King’s College, Queen Mary, Manchester, Lancaster, Liverpool, Sussex and Cardiff University (UK), CNRS (France), ATR International (Japan), A*STAR (Singapore), and high-tech companies worldwide.
(source: Short CV)
Research Interests
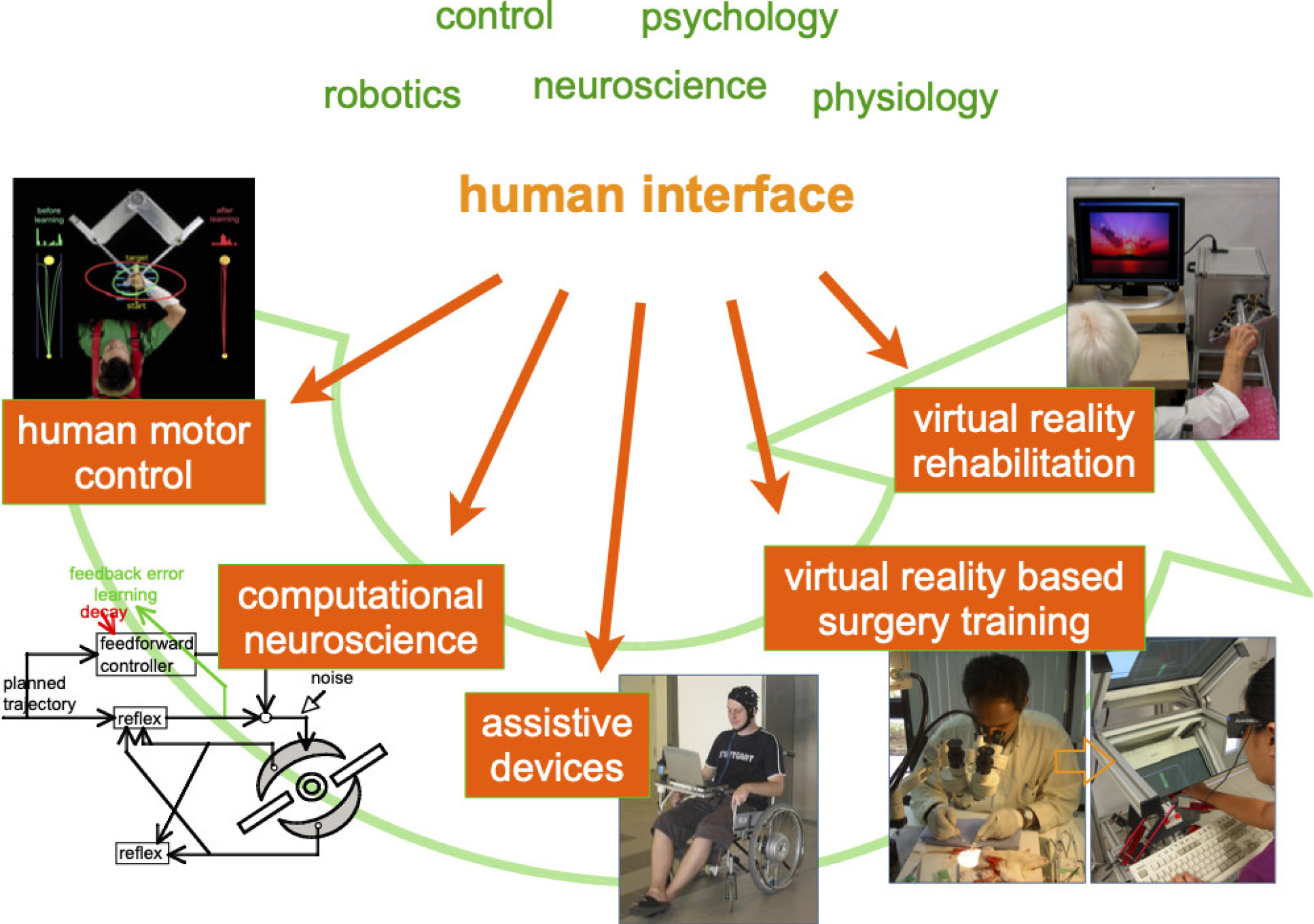
(source: Human Robotics)
Contact
- Human Robotics Group at Imperial
- [University](Human Robotics Group at Imperial)
- Google Scholar
- Semantic Scholar
- ORCID
Selected Publications
- Yanan Li, Ganesh Gowrishankar, Nathanaël Jarrassé, Sami Haddadin, Alin Albu-Schäffer, Etienne Burdet, Force, Impedance, and Trajectory Learning for Contact Tooling and Haptic Identification, 2018. [Project Page]
- Bram Vanderborght, Alin Albu-Schäffer, Antonio Bicchi, Etienne Burdet, Darwin G. Caldwell, Raffaella Carloni, Manuel G. Catalano, Oliver Eiberger, Werner Friedl, Ganesh Ganesh, Manolo Garabini, Markus Grebenstein, Giorgio Grioli, Sami Haddadin, Hannes Höppner, Amir Jafari, Matteo Laffranchi, Dirk Lefeber, Florian Petit, Stefano Stramigioli, Nikolaos G. Tsagarakis, Michaël Van Damme, Ronald Van Ham, Ludo C. Visser, Sebastian Wolf, Variable impedance actuators: A review, 2013. [Project Page]
- Ganesh Gowrishankar, Nathanaël Jarrassé, Sami Haddadin, Alin Albu-Schäffer, Etienne Burdet, A versatile biomimetic controller for contact tooling and haptic exploration, 2012. [Project Page]
- Bram Vanderborght, Alin Albu-Schäffer, Antonio Bicchi, Etienne Burdet, Darwin G. Caldwell, Raffaella Carloni, Manuel G. Catalano, Ganesh Gowrishankar, Manolo Garabini, Markus Grebenstein, Giorgio Grioli, Sami Haddadin, Amir Jafari, Matteo Laffranchi, Dirk Lefeber, Florian Petit, Stefano Stramigioli, Nikolaos G. Tsagarakis, Michaël Van Damme, Ronald Van Ham, Ludo C. Visser, Sebastian Wolf, Variable impedance actuators: Moving the robots of tomorrow, 2012. [Project Page]
- Chenguang Yang, Ganesh Gowrishankar, Sami Haddadin, Sven Parusel, Alin Albu-Schäffer, Etienne Burdet, Human-Like Adaptation of Force and Impedance in Stable and Unstable Interactions, 2011. [Project Page]